
皆さまごきげんよう.広報で機械班の後藤です.
遅くなりましたが,関東夏ロボコンに出場していましたので,その結果などをご報告いたします.ロボット紹介もしていますので是非ご覧ください.
この記事はrogy Advent Calendar 2019の6日目の記事です.
関東夏ロボコンとは
今年から新たに開催されたロボコンです.主にNHK学生ロボコンに挑戦するチームが参加する大会で,NHK学生ロボコンの練習や新人教育の場となっています.他の部活動でいうところの,新人戦,練習試合,交流試合といったところでしょうか.
リンク:関東夏ロボコン公式HP
今年の競技課題は”Extract a secret!”.スリッパを盗聴器に見立て,自陣の「工場ゾーン」から回収し,決まった場所から相手のコートに投げ入れることで,「潜入完了」の達成を目指すといったものです.「スパイロボット」と「公安ロボット」の2台,または1台で参加できます.詳しくはルールブックなどをご覧ください.
今年は8月28日に東京工業大学の体育館で開催されました.4大学6チームが出場し,総当たり形式で行われました.
Maquinistaの参加状況
NHKロボコンが終わってから次のルールが発表されるまでの期間,Maquinistaはこれまで,とうロボ(東海地区交流ロボコン)やF^3RCに出場していました.
今年は,よりNHKの練習になりそうな関東夏ロボコンに出場することにしました.1年生はF^3RCか関東夏ロボコンのどちらかに参加し,関東夏ロボコンに参加する1年生は2年生と一緒に製作しました.
AチームとBチームの2チームが出場しました.それぞれ1年生が10人程度,2年生が2~3人で構成されています.
大会結果
Aチームは第三位,Bチームは優勝しました!!
Bチームはすべての試合で勝利し,潜入完了を1回達成しました.このときの動画はこちら.
Bチームは技術賞も受賞しました.
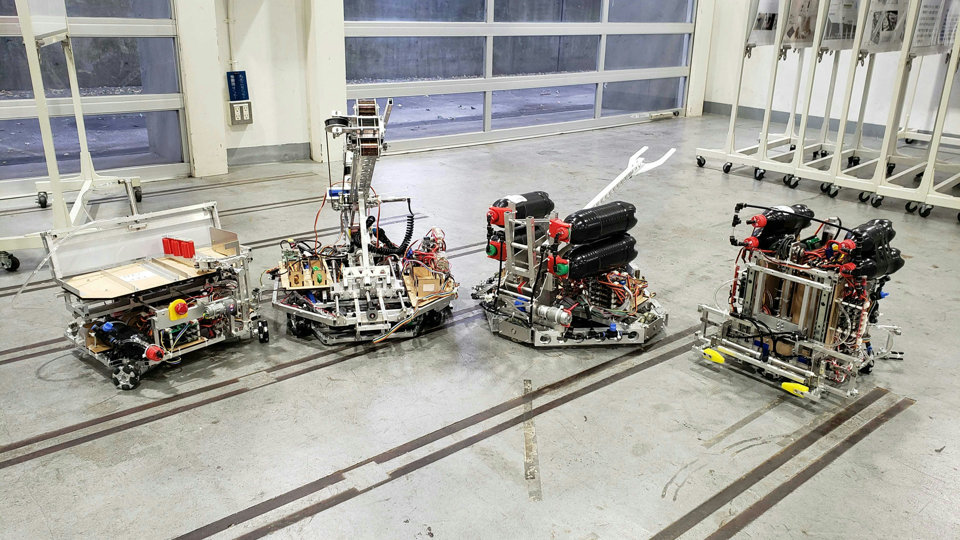
ロボット紹介(Aチーム)
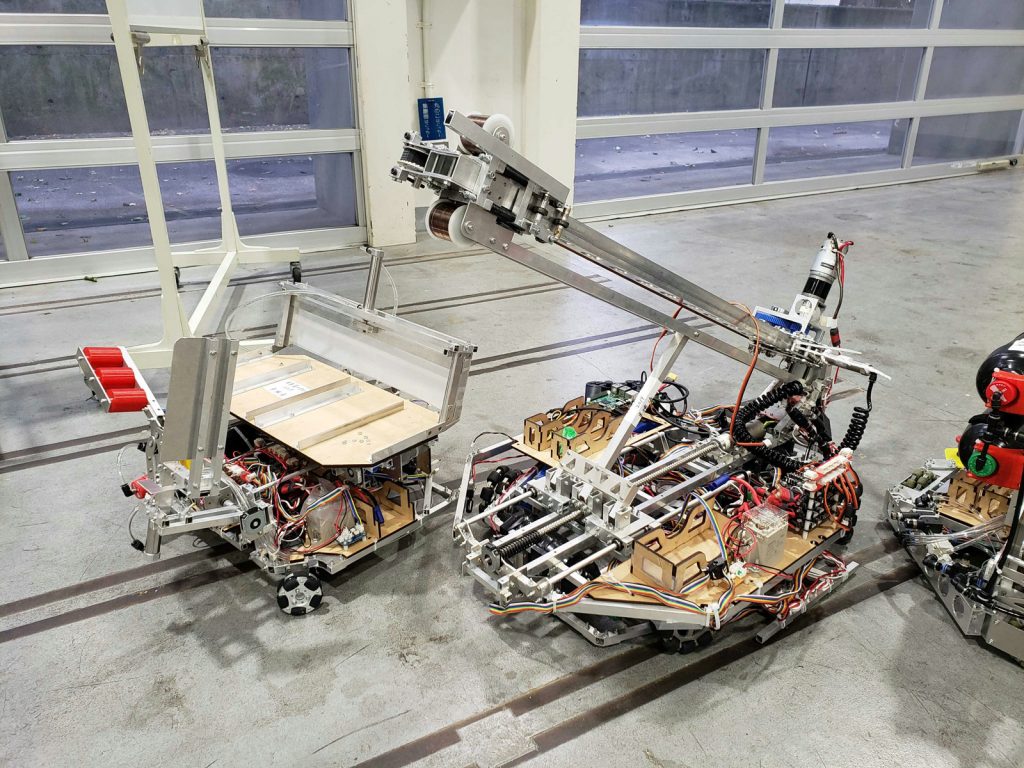
スパイロボット『LEOPARD』
右側のロボットです.定荷重ばねを用いた直動機構によりスリッパを投げます.滑りねじとモーターの機構によりこの投擲機構のピッチ角が変わるため,受け渡しや装填もできるようになっています.
当日は移動機構のモータードライバーのコネクタの接触不良により,あまりうまく動きませんでした.
この記事で設計者自らが射出機構のこだわりや工夫点を説明していますので、ぜひご覧ください!
公安ロボット『MADMAX』
左側のロボットです.このチームはケースを使わずに,床に置いてあるスリッパを直接機体に乗せて運ぶコンセプトで製作しました.赤いローラーのついたハンドで,機体に搭載されたテーブルに乗せます.このテーブルは2次元的に動くので,スリッパを並べて置き,スパイロボットに差し出すことができます.制限寸法ギリギリだったので『MADMAX』という名前になりました.
ロボット紹介(Bチーム)
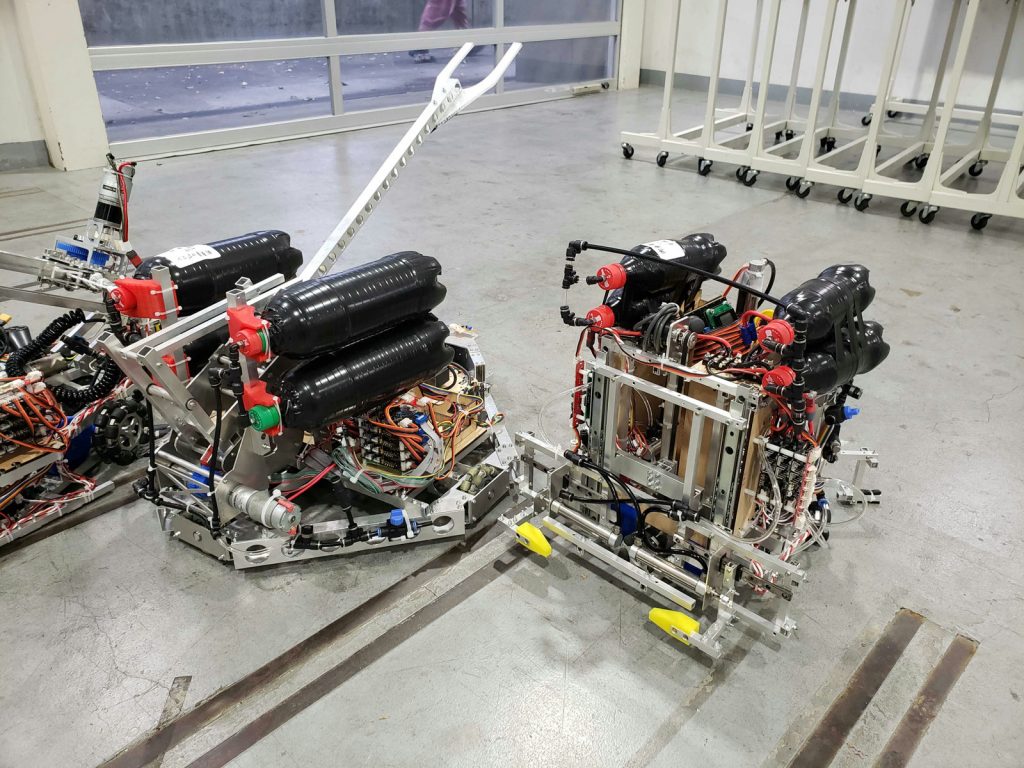
スパイロボット『Rook』
左側のロボットです.スリッパはエアシリンダを用いたリンク機構で投げます.この投擲機構は歯車とモーターを用いた機構により移動機構との角度を変えられます.これにより,狙いを定めることができるほか,公安ロボットが運んできたスリッパをピックアップする動きもできます.
実は他のチームのロボットはすべて直動機構で投げていたので,このロボットは「回転投げ」で「エアシリンダ」の投擲機構を搭載した唯一のロボットでした.
こちらもジャイロセンサが不調で,大会では戦略的にリトライして角度を合わせないといけない状態でしたが,公安ロボットの速さと安定性のおかげで3分以内に12個すべて投げることができました.
公安ロボット『The Hand』
右側のロボットです.特徴は何といっても黄色のハンド部分です.くさび型になっていてスリッパを乗せるケースの穴に突き刺します.ケースを落としたり,揺れたりする心配がない機構ということで採用しました.ケースを把持したハンドはモーターで持ち上げて,スパイロボットに受け渡します.この記事で詳しい機構の説明や工夫点の紹介をしているので、もしよかったらご覧ください!
下は1年生が作った専用コントローラー『Synapse』です.
