
ロ技研秋のブログリレー2020の8回目の記事です。
2018年入学,Maquinista機械班の後藤です.工学院機械系に所属しています.
この記事ではオンライン!学ロボFESTIVALに登場したロボット「Ronnie」に搭載している,ボールをキックする機構について紹介したいと思います.同時に「機械設計ってどんなことをやるんだろう」というのもお伝えできたらと思っています.
オンライン!学ロボFESTIVALとは
オンライン!学ロボFESTIVALとは,中止になってしまった2020年度のNHK学生ロボコンの代わりとして開催された大会です.この大会で,Maquinistaはトヨタ自動車株式会社様から特別賞をいただきました!
こちらの記事でMaquinistaが投稿した動画を紹介していますので,まだ見ていない人はぜひご覧ください.(ちなみに1本目と3本目の動画の構成と編集は私が担当しました.)
これから紹介するキック機構
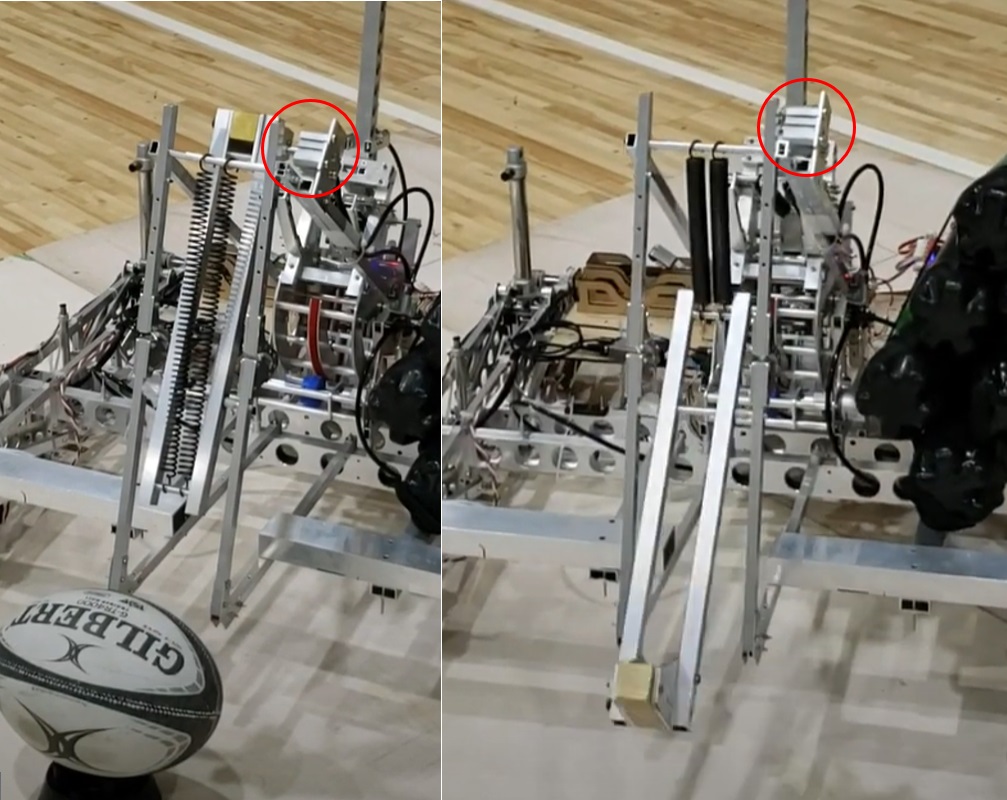
まずはこちらをご覧ください.東京工業大学のパスロボット「Ronnie」のキック機構の紹介動画です.
NHK学生ロボコン2020のテーマは「ROBO RUGBY」であり,競技課題の1つに「ロボットがラグビーボールをキックしてコンバージョンポストに入れる」というものがありました.
ご覧いただいたように,Maquinistaはバネによって「足」を勢いよく回転させることでキックを実現しました.そのバネを伸ばす動きもモーターによって自動で行っています.
ここからは,このような機構になった経緯や,設計や製作の流れについて紹介します.
実験機構と1号機
最初にやったのは「どういう機構だったらボールが飛ぶか」を試す実験です.とりあえず,バネとかで足みたいなやつを勢いよく半回転させれば飛びそう,ということでこういうのを作ってみました.

やってみると…すっごく飛びました.すごくいいのを引いてしまったようです.一応,モーターで直接足を回転させる機構も作りましたが,あまりうまくいきませんでした.
というわけで,バネを使ったこの方式を採用しました.機体(1号機)に搭載した様子が下の写真と動画です.このときは人の手で引っ張って,バネを伸ばしていました.キックの発動は,足をエアシリンダのロッドに引っかけておいて,引っ込めて発動,というようにしていました.
どうやって充填するか
飛んだのはいいんですが,さすがに人間が引くのは時間かかるし,危険だし,力がいるのでやりたくないです.ロボット自身がバネのエネルギー充填(引き伸ばし)をできるようにしたい,となりました.
しかし,どうやってやればいいのか,というのが難しく,充填に関しては試行錯誤がありました.下はエアシリンダを使って充填しようとして,失敗した機構です.

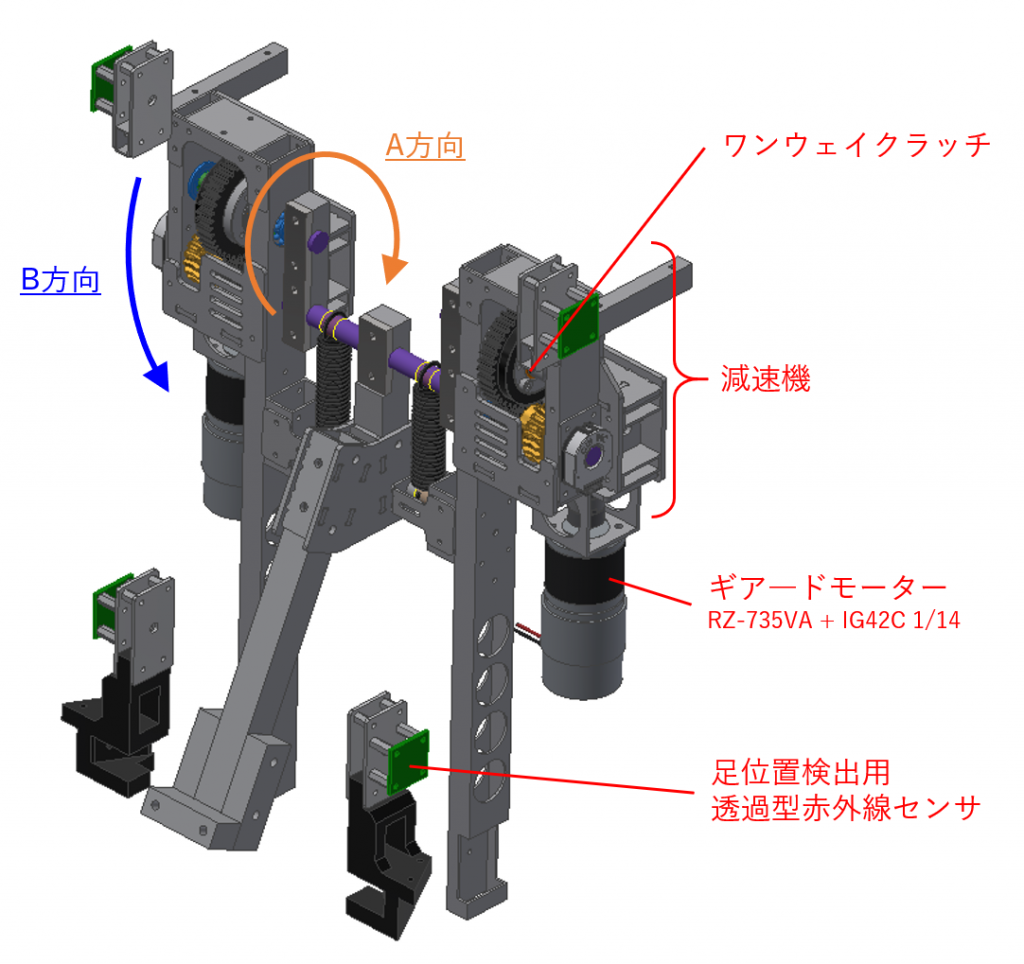
いろいろ悩んでいたところ,OBの方に下のようなものを提案していただきました.モーター&減速機で足の回転軸を大きなトルクで回すのですが,ワンウェイクラッチがあることで,充填とキック発動ができるようになっています.野球ボールを投げるピッチングマシンにも似たようなものがあるとのことです.
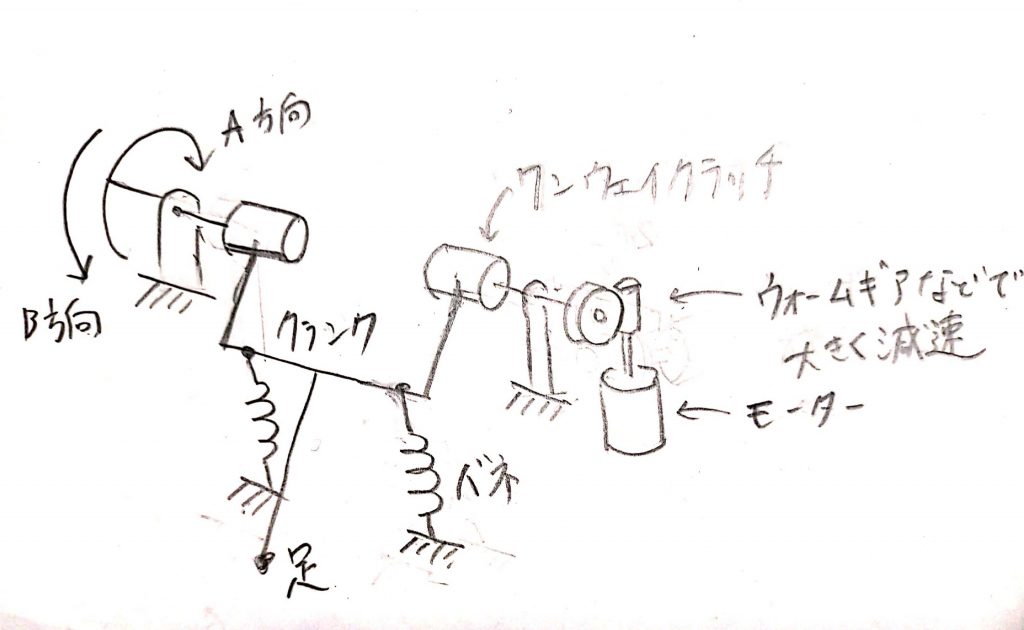
ワンウェイクラッチは,足がA方向にはするする動け,B方向に動こうとするとクラッチがかかるように設置します.
充填は,足がA方向に動くようにモーターを回して行います.このときバネはB方向に足を回そうとしますがクラッチがかかるので,結局A方向に動きます.足が真上に来る「少し前」に止めて,充填完了とします.
発動のときは,少しA方向に回して,足が真上を越すようにします.そうすると,今度はバネはA方向に足を回そうとします.この方向ならするする動くので,足は勢いよく回転し,キックができるというわけです.
バネによるトルクを知りたい
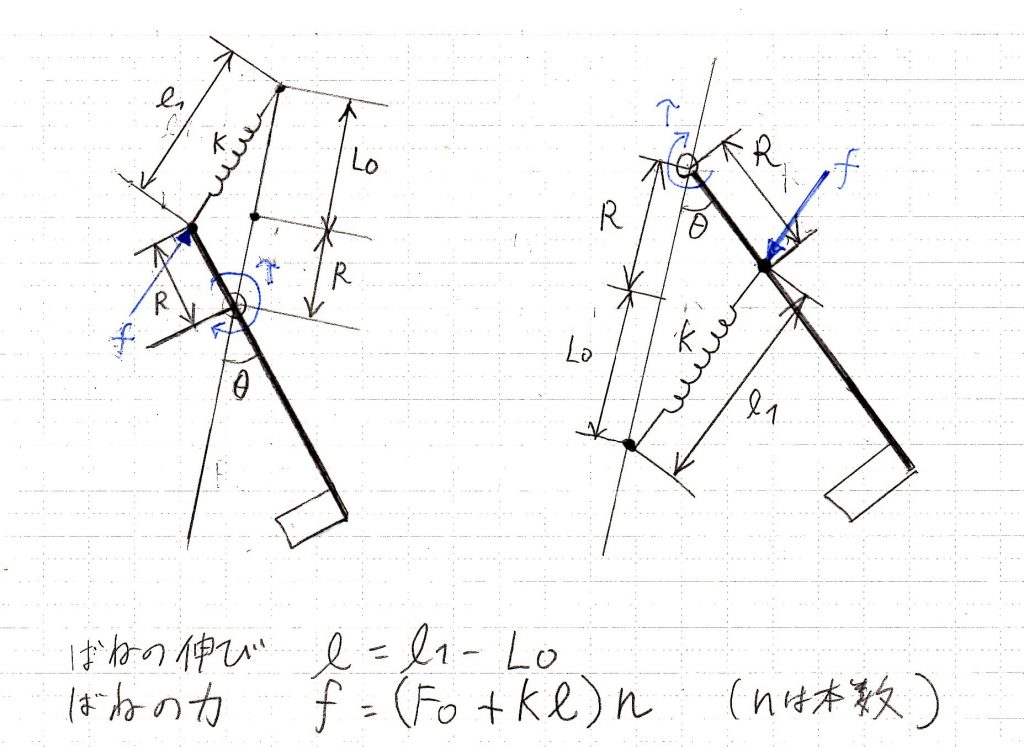
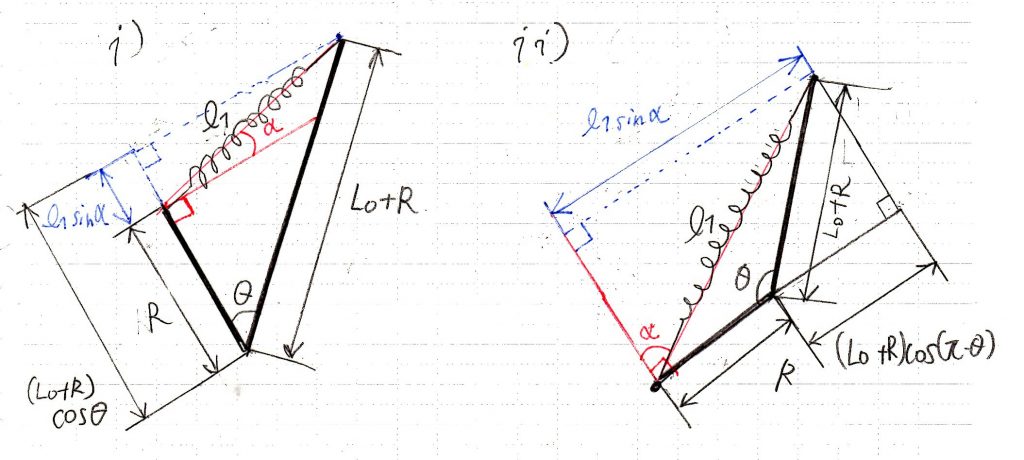
この機構を作るには,壊れないワンウェイクラッチを選ぶ必要がありますし,減速比も求める必要があります.そのためには,バネが足を回そうとするトルクがどのくらいかわかっていないといけないです.というわけで,バネがどれくらいトルクを出しているかを計算しました.
また,今までバネを定格の3倍引き伸ばしていたことがわかり,実際目に見えてへたってきていました.せめて1.5倍くらいにおさめたいので,バネも再選定しました.
下の図は計算のときに使ったメモ書き.
エクセルで数値を出して,グラフにしました.
バネの再選定ですが,それまでの機構よりはトルクが出て,かつ定格のオーバー具合が減るように,新しいバネとRの値を探す,というように行いました.それまではこのバネでR=100 mmとしていましたが,再選定して,このバネでR=40 mmとしました.それまで3倍近くオーバーしていたのが1.67倍になりました.
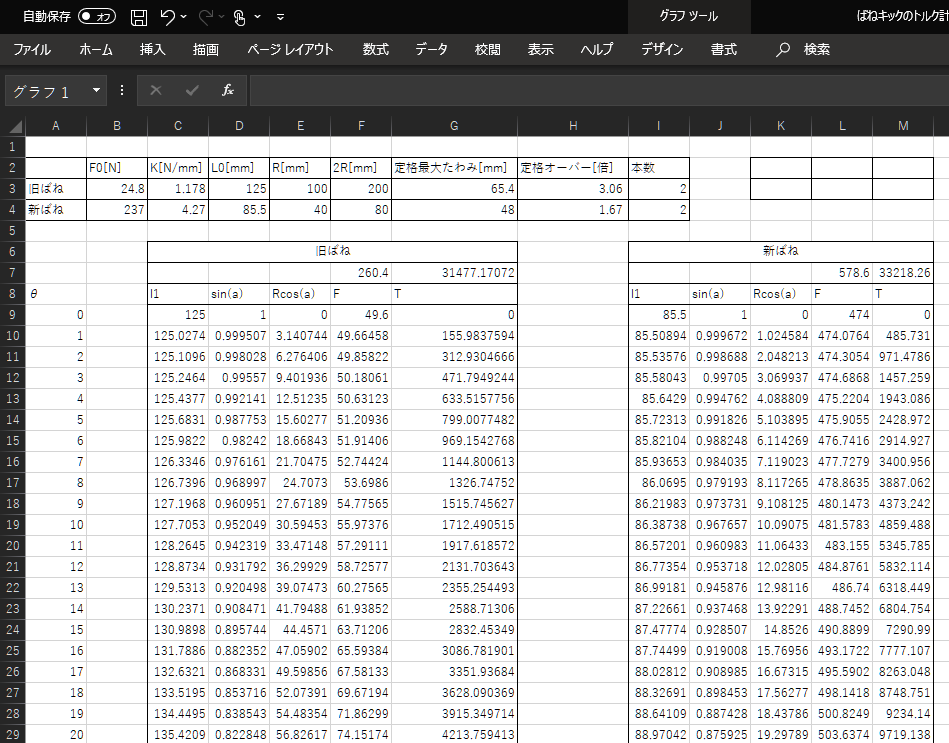

計算の結果,2本のバネが出すトルクは最大でも35 N・mを超えないことがわかったので,ワンウェイクラッチは片側1個で20 N・mを耐えられればいいかなとしました.重力も一応計算しましたが,影響はあまり大きくなさそうなので無視しました.
減速比決定
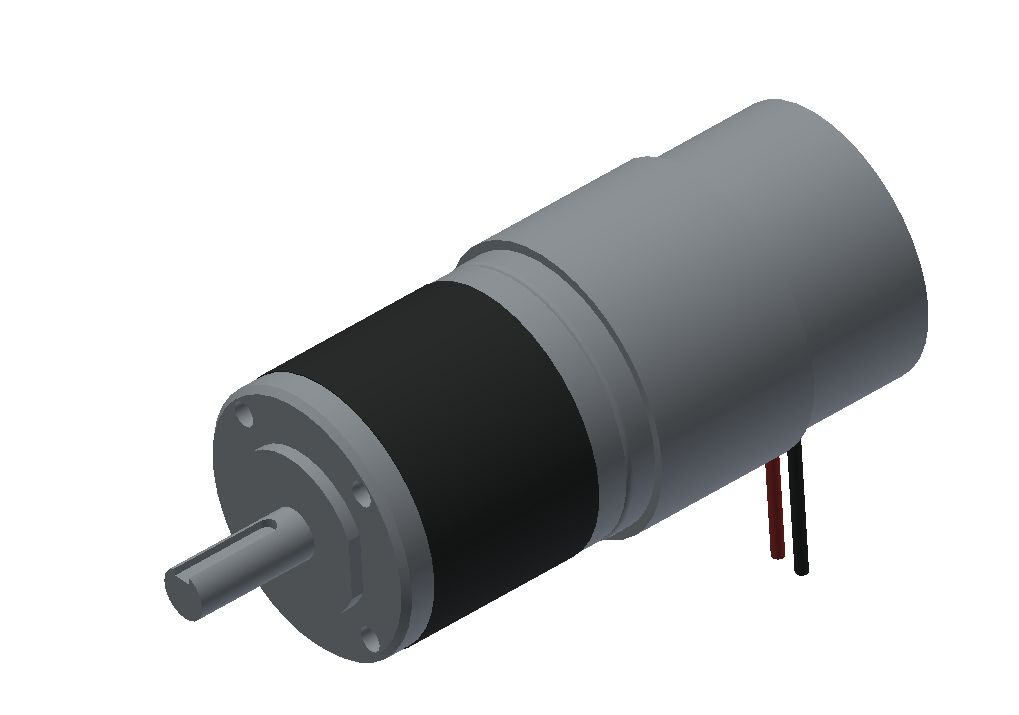
バネによるトルクがわかったので,減速比が決まります.まず,Maquinistaで所持しているなかで,比較的大きなトルクが出力できる「RZ-735VA+IG42C 1/14」というギア―ドモーターを選択しました.
両側につけるので,片側で35 N・mの半分である17.5 N・mを出せればよさそうです.ギアヘッドIG42C 1/14の許容トルクは0.78 N・m(定格)~2.35 N・m(瞬間)であり,ウォームギアを使うので効率は40%くらい,と考えて,ギアヘッド出力軸からワンウェイクラッチまでの減速比は50としました.0.78×50×0.4=15.6 N・m,2.35×50×0.4= 47 N・m なので,よさそうです.
部品選定
ワンウェイクラッチをいろいろ探したところ,FCB-16 はトルク容量20.59 N・mで要件を満たし,軸受が入っていて使いやすそうだったので,これを採用しました.
ワンウェイクラッチを使うときはそれ自体をどうやって固定するのかが問題となってきます.今回はなかなかトルクが大きそうなので,自作部品ではなく,ちゃんとした部品を使いたいと思い,メカロックを使うことにしました.探してみるとアルミ製のメカロックというものがあり,普通のものよりは許容トルクが小さいものの,軽くて省スペースでよさそうでした.FCB-16 にあう内径を持つのはMLBA22 で,許容トルクが50.1~70.0 N・mで余裕なので,これを採用しました.
ただ,MLBA22 は直径39mmの穴に対応しています.こういった大きな穴を自前で加工するのは難しいですし,そもそもそれだけの大きさの「金属塊」を用意するというのも,辛いものがあります.
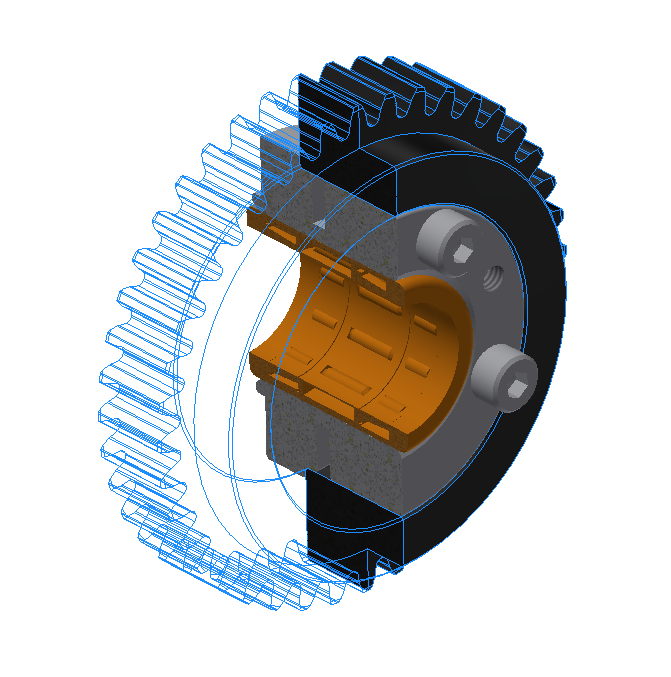
そこで,そういう穴を持つ平歯車を発注すればいいのでは?と考えました.MISUMI-VONAの「平歯車 歯幅・ボス寸法指定タイプ」は,細かくいろいろ寸法を指定して発注できる,かつ3DCADデータが手に入るので,これを使うことにしました.MLBA22 がしっかり収まる中で,できるだけ小さく軽くなるように寸法を選ぶと,GEFHBB1.5-40-10-39-W6-H52となったので,これを採用しました.(メカロックの性能に対してトルクが大きくないので最小ハブ外径は無視しました.)
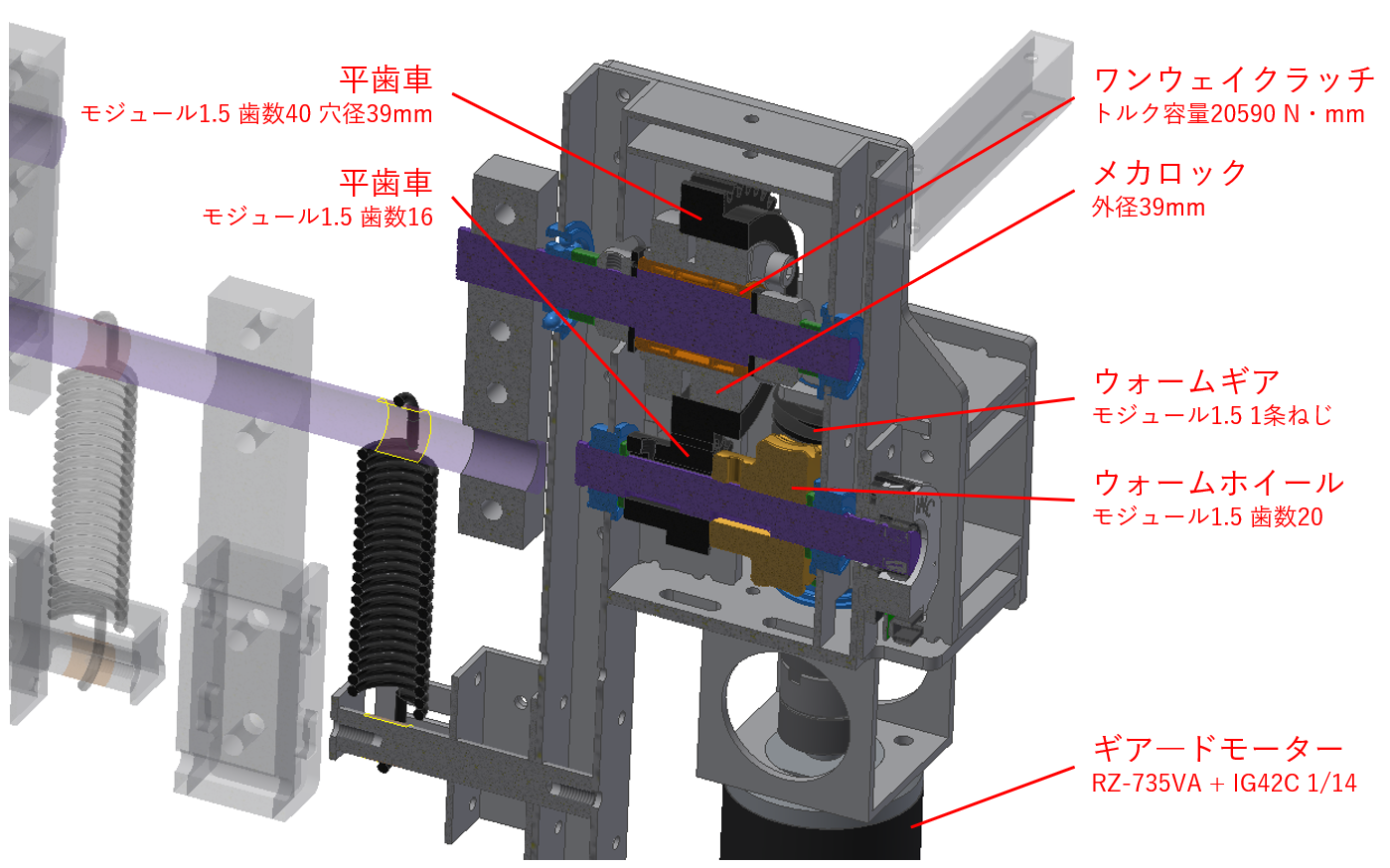
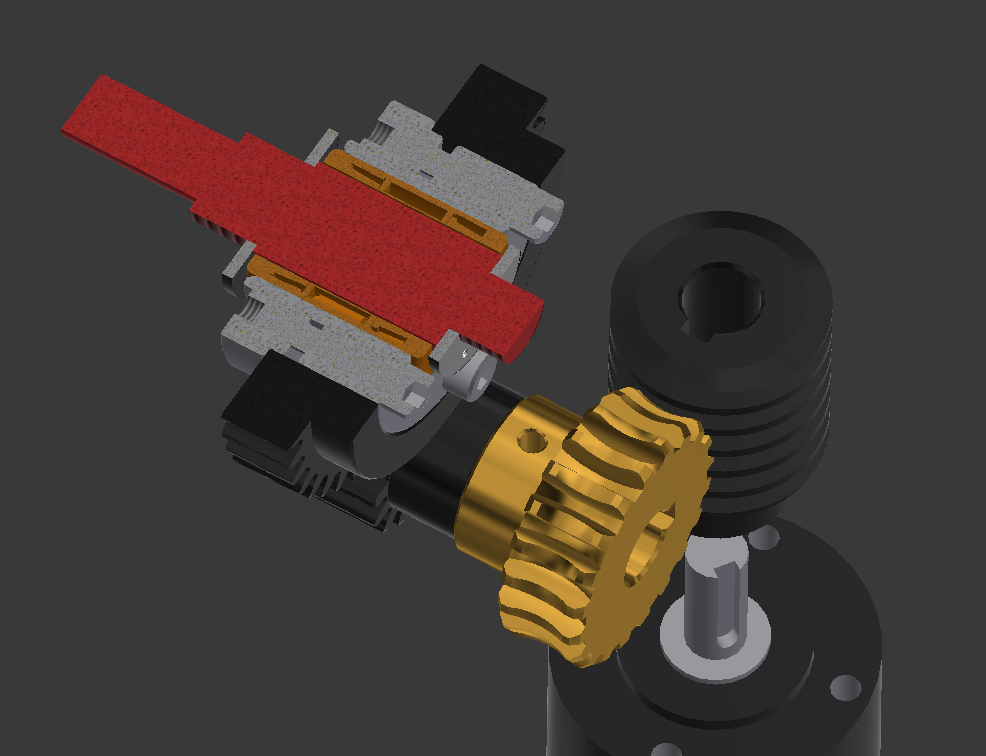
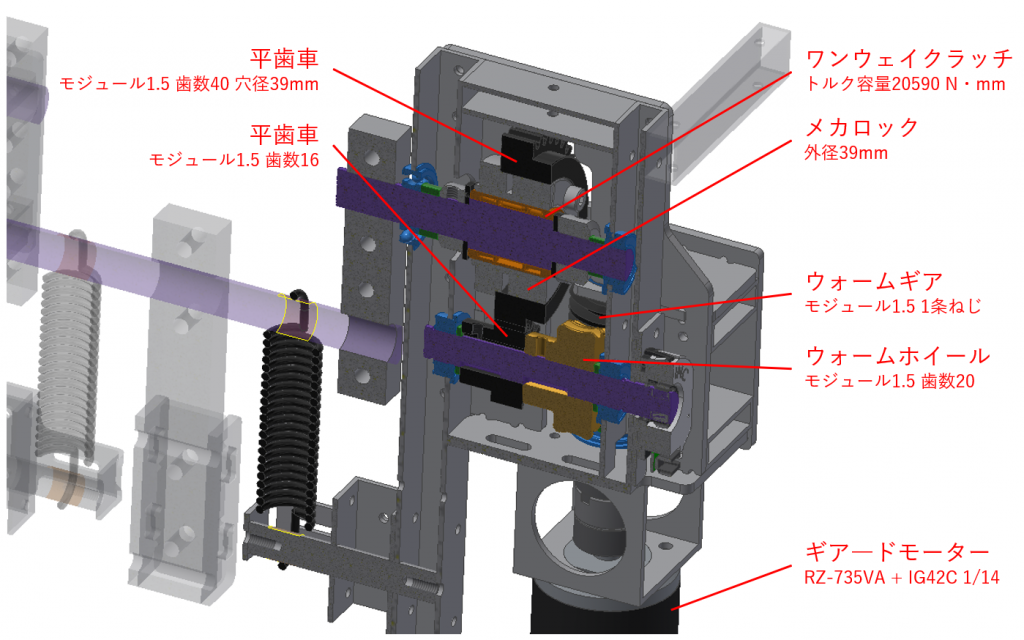
これまでの選定でこんな感じになりました.
平歯車を使ったので,平歯車の組とウォームギアとウォームホイールの組の2段で減速比50を作り出すことになります.平歯車の歯数は40と16,ウォームギアは1条,ウォームホイールの歯数は20としました.これに合うように,小さい平歯車・ウォームギア・ウォームホイールを選んだところ,こんな感じになりました.
部品発注
この設計をしていたとき,ちょうど,ミスミ学生ものづくり支援で,無償で提供していただけるものを選ぶ時期でした.本当にちょうどいい時期だったので,ワンウェイクラッチ・平歯車・ウォームギアなど,キック機構に使う部品を提供していただきました.キック機構は購入部品が多くて出費が大きいな,と思っていたところで,非常に助かりました.

ミスミ様より写真のような歯車などの機械部品をいただきました。歯車の各部の寸法を細かく指定できて、とても助かりました。ありがとうございます!#ミスミ学生ものづくり支援 pic.twitter.com/9eXeb6I8ab
— Maquinista@東工大 (@maquinista_rbcn) February 20, 2020
CADで詳細を設計
ここまで決まれば,軸受をつけたり固定したりする設計をして,設計は終わりです.こんな風になりました.エンコーダは一応ついていますが,使わないで動いたので使ってないです.
加工して組みたてて動かす!
下の動画は組み立てが終わった日に,初めて電源装置で動かしてみたときの様子です.机に万力で固定しています.結構いろいろ考えたし,お金も使ったしで,緊張の一瞬でしたが,無事思い通りに動いてくれて,嬉しかったです.
いかがでしたか?
キック機構の製作の流れを紹介しました.
わかりづらい部分があったかもしれませんが,機械設計っていろいろ考えてやるんだなあと思っていただけたら幸いです.