2017年度入学、回路制御班のいとまさです。今回は「自己位置推定」について書いていきたいと思います。
この記事を通じて、「自己位置推定ってロボコンにおいてとっても大事なんだ!」とか「自己位置推定に興味が湧いてきた!」とか感じてもらえると幸いです。
他の新歓ブログ記事はこちら
自己位置推定とは何ぞや
「自己位置推定」とは、ロボットの自己の現在位置を推定する技術のことです。これだけではわからないと思うので以下で「自己位置推定」をしていないロボット君を人間に例えてみましょう。
ロボット君は目をつぶっている状態と考えられます。最初どこにいるかがわかっていても、移動した場合は何歩移動したのかしかわかりません。仮に部屋の構造をを知っているお家の中だとしても目をつぶって生活するのは難しいですよね。移動歩数がわかったとしても何メートル進んだかはだいたいしかわかりません。
もし自分が部屋の中を移動するときはどうしますか?当然、目を開けて移動しますね。ロボット君の場合は「目を開ける=カメラをつける」と考えられます。カメラだけでなくレーザーセンサもよく用いられます。
仮に目をつぶっているときはどうしますか?壁などを触って移動しますね。ロボット君の場合は「壁を触る=タッチセンサなどをつけて壁に当てる」と考えられます。
このようにロボットが移動する場合、自分がどこにいるのか認識するためには、ロボットにセンサをつけて環境の情報を取得して情報を処理する必要があります。それが「自己位置推定」という技術なのです。
ロボコンと自己位置推定
ロボコンにおいては自己位置推定の制度は勝敗に直結します。
ロボットがどこにいるかなんてそんなに重要じゃないかと思うかもしれません。しかし、ロボットの位置がどこかを正確に知ることはとても大事なことです。
例えば、決められたコースをロボットが走ることを考えると、ロボットがどこにいるかわからなければ目的地にたどり着くことや障害物を避けることができません。なぜなら、コースの情報がわかっていて、あらかじめ走るコースを設計していたとしても、ロボットは毎回同じ動きをしてくれるわけではないので誤差が乗って行ってしまいます。
同様の理由から、ものを回収するときや投げる時もロボットがどこにいるのかはとても大事です。
ロボコンに自己位置推定の技術がいかに大事かがわかっていただけたと思います。
自己位置推定とセンサ
前々項で述べた通り、自己位置推定にはセンサが必要不可欠です。例えば、カメラ・レーザセンサ・光センサなどを使用します。ロボットがどこにいるのかを知るためには、競技フィールド上の壁や障害物やラインをそれらのセンサで検出することが多いです。
ただ、センサから得られる生の情報はロボットの位置を直接教えてはくれませんし、当然誤差が存在します。そこで、回路制御班の中で自己位置推定を中心に行う人は、それらのロボットにつけたセンサの情報からロボットがどこにいるのかを算出します。また、ロボットの位置の情報の算出だけでなく、カメラを利用して物体の検出を行なったりなど様々なこともしています。
最近流行りの自動運転でも近い技術は使われています。分野としては画像処理に近いことをやっています。
センサによるデータ
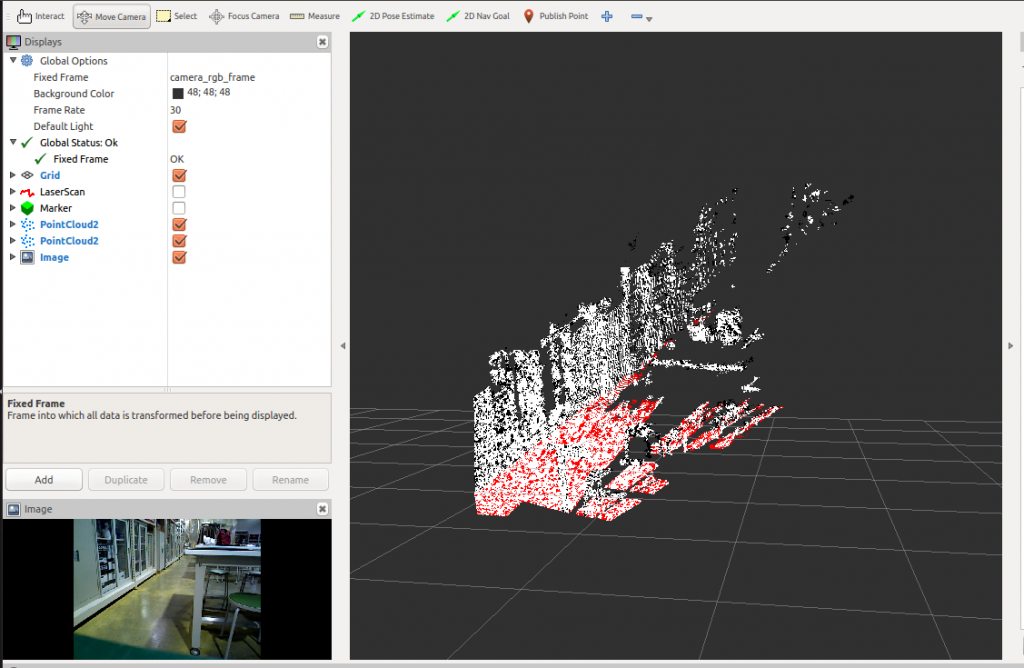
自己位置推定の技術を垣間見るためにセンサの実際のデータを見てみましょう。下の画像では左下にRGBカメラの画像、右側に深度センサの情報を表示しています。RGBカメラからは各画素のRGB情報、深度カメラからは3次元の点群情報が得られているのがわかります。また、深度カメラの情報を一部処理しており、赤くなっている部分が床面を示しています。このようにしてセンサのデータから必要な情報を取り出しています。
自己位置推定以外にもセンサを使用する例をみていきたいと思います。
下の動画は測域センサをロボットに取り付け、フィールドで動かしている様子です。フィールドの木枠が黄色・緑色・水色の点群として表れているのがわかります。 この動画では自己位置推定ではなく、別のロボットに反射材を取り付け、それを検出することで、動きを変更するというようなことをしています。ロボットの動きがどのように変更されているのかはわかりませんが、反射材が赤い点群で示され、動いている様子が見られると思います。
マキニスタにおける自己位置推定
2017年のNHKロボコンでは測域センサによりポールの認識と壁の認識による自己位置推定を行なっていました(動画4:21~)
2016年のNHKロボコンでは小型ロボットの自己位置推定をカメラによって行なっていました。
ぜひMaquinistaに
今回は回路制御班のお仕事の一つである、自己位置推定について書きました。
NHKロボコンでは数ヶ月という短い期間で大きな完成度の高いロボットを完成させる必要があります。そのため多くの人が分業をして、チームとして活動をしていきます。TVでは何気なく簡単に動いているように見えるロボットであっても、様々な技術が結集されて初めて成り立っているのです。その中の一分野である自己位置推定の分野に少しでも興味を持ってもらえると嬉しいです。
この記事を見て少しでも興味が湧いた方はぜひMaquinistaへ!知識や経験はいりません、興味とやる気のある方なら大歓迎です!!