皆さん、こんにちは
19プロジェクトリーダーの苗村です。
結果を先に言いますと、Maquinistaは予選ブロックで2敗という結果で2019大会を終えました。
まずはそれぞれの試合について振り返っていこうと思います。
Maquinistaは予選Cグループに入り、豊橋技術科学大学さん、京都大学さんと同じ組になりました。
予選2戦目( vs京都大学さん)
MR1がスタートと同時に勢いよく動き出しましたが、壁と激突
壊れた部分を直して調整し試合終盤になんとか復旧し動き始めましたが、ゲルゲの受け渡しに失敗。
その間に京都大学さんがウーハイを達成し敗退となりました。
壁と激突した原因ですが、計測輪のエンコーダが1つ読めていませんでした。
MaquinsitaのMR1は自動制御で動く方式だったのですが、ロボットが自分の位置をきちんと把握できていなかったため壁と激突してしまいました。
この時点で京都大学さんが予選2勝となり、Maquinistaは予選敗退が決定しました。
予選3戦目( vs豊橋技術科学大学さん)
この試合では無事にMR1は動き出し、ゲルゲの受け渡しエリアまでたどり着くことができました。
しかし、ゲルゲの受け渡しがうまくいかずそこでリトライ
何とか受け渡すことができたのですが、今度はMR2が自分の位置をきちんと把握しておらず段差手前で停止
何度かやり直してみるも段差を超えることができませんでした。
結果、3分が経ち段差をクリアした豊橋技術科学大学さんに敗退となりました。
予選2敗で敗退という結果はここ4年間で最低の結果であり、本当に悔しく思っています。
また、応援していただいた皆様に対して本当に申し訳なく思っています。
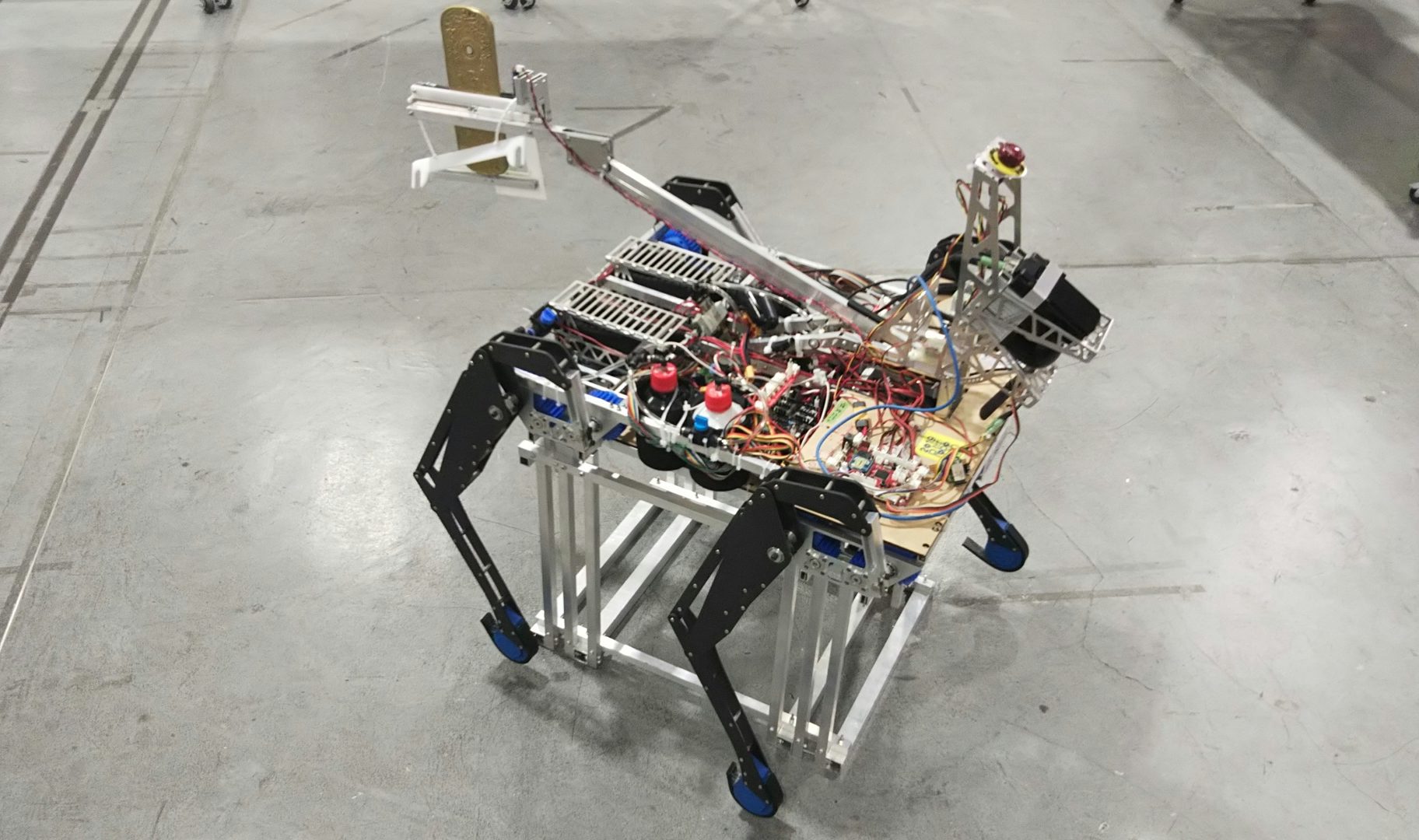
Maquinistaは今大会で4輪ステアを含め様々な新しいことにチャレンジしてきました。
この技術の積み重ねが数年以内には必ず花開き、再び優勝することができると私は確信しています。
今大会をもちまして私を含め4年生(16)は引退となります。
今までチームメイトとして一緒に戦ってきた14~18の皆さんやライバルとして共に戦ってきた他大学の皆さん、そして応援してくださった皆さん、本当にありがとうございました。
16を代表してお礼申し上げます。
また、今回の大会では様々な企業の方にご支援いただきました。
北陽電機社様には大変高価な3次元測位センサを無償でお借りさせていただきました。精度の良いセンサが求められる中で、高精度なセンサを利用することができ大変助かりました。お借りさせていただいたこと大変感謝しております。
ミスミ社様には学生ものづくり支援としてミスミ社様の製品を無償で使用させていただきました。気軽に購入することが困難である高価な部品をご支援いただき、大変感謝しております。
タクミ商事株式会社様には高性能な6軸センサであるエプソン社の『M-V340』を紹介していただきました。4足歩行という今年度の難題に対して、6軸センサはとても大きな力になりました。紹介していただきましたこと、大変感謝しております。
その他、今まで活動の場を提供してくださったロボット技術研究会とものつくり教育研究支援センターの方々をはじめとして、大学の関係者には大変お世話になりました。この場を借りてお礼を申し上げます。
金銭的に厳しい学生団体であるMaquinistaにご寄付をしてくださった皆様もとても感謝しております。おかげさまで機材の購入や十分な試作、大会ユニフォームの製作等をすることができました。この場を借りてお礼を申し上げます。
最後になりますが、2019年大会の機体の動画をこちらに公開しております。是非ご覧ください。
今後とも東京工業大学Maquinistaをよろしくおねがいします。