
こんにちは。初めてのブログに緊張している22-reenaです。
今回は、2023年9月11日に行われた関東夏ロボコン2023について紹介していきたいと思います。さて、試合結果は如何ほどだったのか、、、
まず、大会概要と競技内容は以下の通りです。
大会概要
- 名称:関東夏ロボコン
- 日付:2023年9月11日
- 会場:高尾の森わくわくビレッジ
今年は、総勢5校9チームがエントリーしました。Maquinistaからは、今年新たに入部した1年生、及び2年生の9人で1チームとして出場しました。
競技内容
今年のテーマは「マンションの建設」。レンガをマンションに見立て、各関東地方の地域に積み上がったマンションの高さで勝敗を決めます。ロボットは、レンガ置き場にあるレンガを回収し、競技フィールド内にある5つの 建設予定地にレンガを置いて、マンションを建設します。レンガは、完全接地している面が小さいほど点数が高くなり、レンガの個数をそれぞれa, b, cと定義するとき、「4a + 2b + c」として点数が与えられます。また、建設予定地にはそれぞれ地価があり、これらの点数が掛け算されたものが最終点数となります。但し、宇都宮だけはマンションが建設できていれば、階数に関係なく10点が与えられます。

建設地毎の地価
試合終了後に得点を集計し、獲得点数が高い方のチームが勝利となります。 競技フィールドは、以下の通りです。
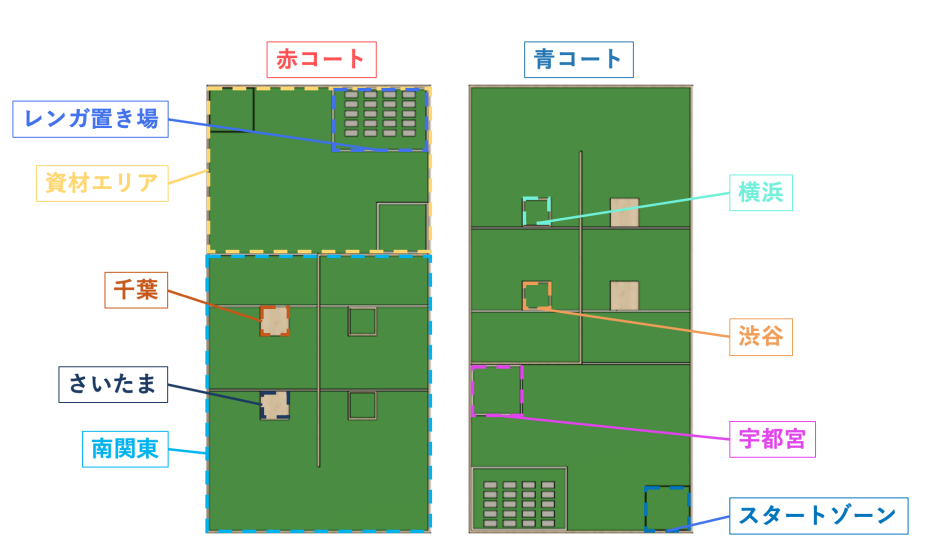
フィールド全体図面
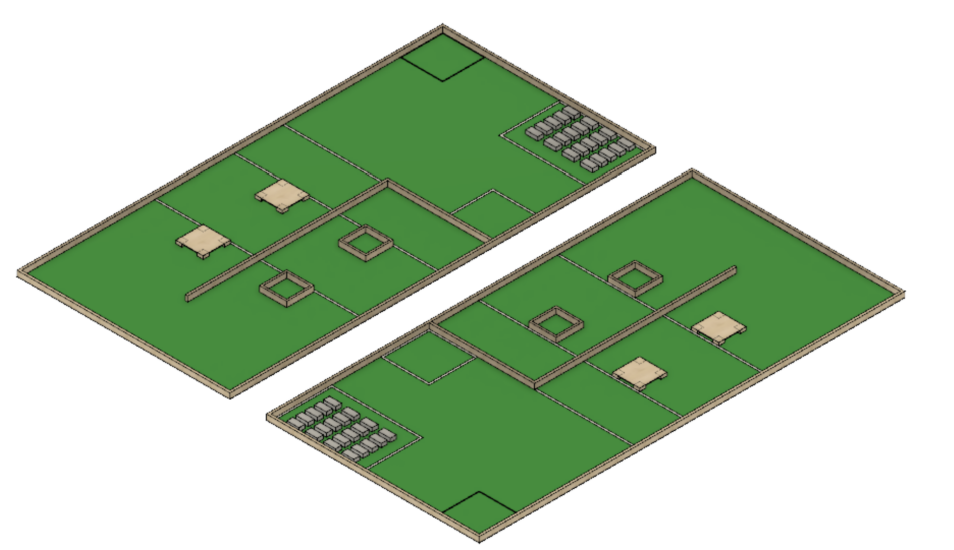
等角投影図
関東夏ロボコンルールブックより引用(https://kantouharurobo.com/natu/2023/KantouNatuRobocon_2023_Rule_2.00.pdf)
大会結果
今回の大会の予選は、3チーム毎に分かれての総当たり戦でした。私達Maquinistaは、ファブリ、豊工不動産と同じチームでした。全体の表は、以下の通りです。
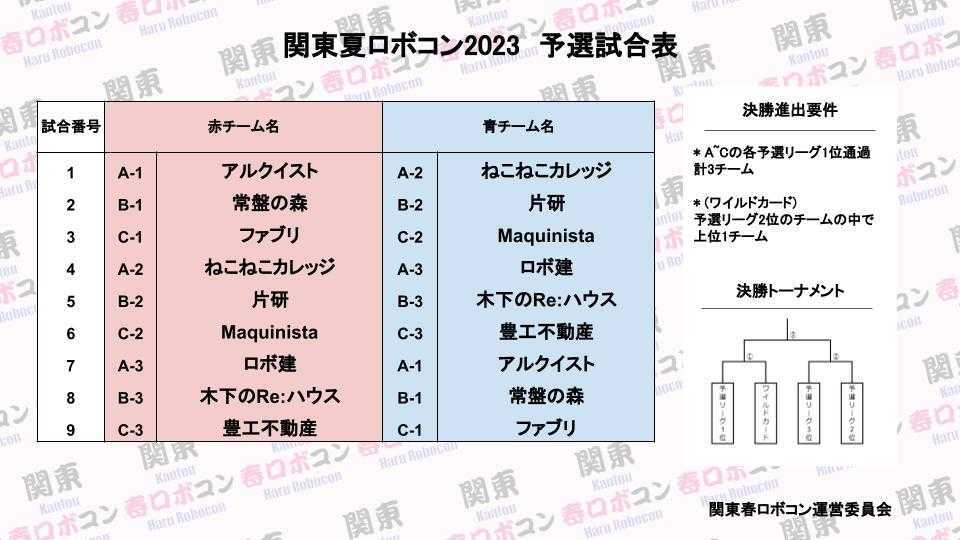
関東春ロボコン運営委員会Twitterより引用
(https://twitter.com/kantouharurobo/status/1701097417570173043)
1戦目
Maquinista vs ファブリ
240 – 810

Maquinistaは、渋谷に16階建てを建設することに成功しました。
ファブリに勝つためには、ベストパフォーマンス(4つの建設地に16階建て+宇都宮)を出さなければいけなかったため、もう少し調整や練習ができていればより良い動きができていたのかもしれません。
2戦目
Maquinista vs 豊工不動産
240 - 261

Maquinistaは、二戦目も渋谷に16階建てを建設することに成功しました。
豊工不動産とは、ものすごく接戦だったため、きちんとした戦略を立てておけば勝てる可能性も十分にあったのではないかと思っています。また、 2つ目の建設地を横浜ではなく、確実な埼玉にしておけばよかったと少し後悔しています。
総合結果
結果的にMaquinistaは、0勝2敗となり、ワイルドカードにも選ばれなかったため、残念ながら決勝進出を果たすことはできませんでした。今回の試合結果から計画や戦略立てが如何に重要なのかを理解し、勝利するためには欠かせない要素であるということを改めて実感することができました。
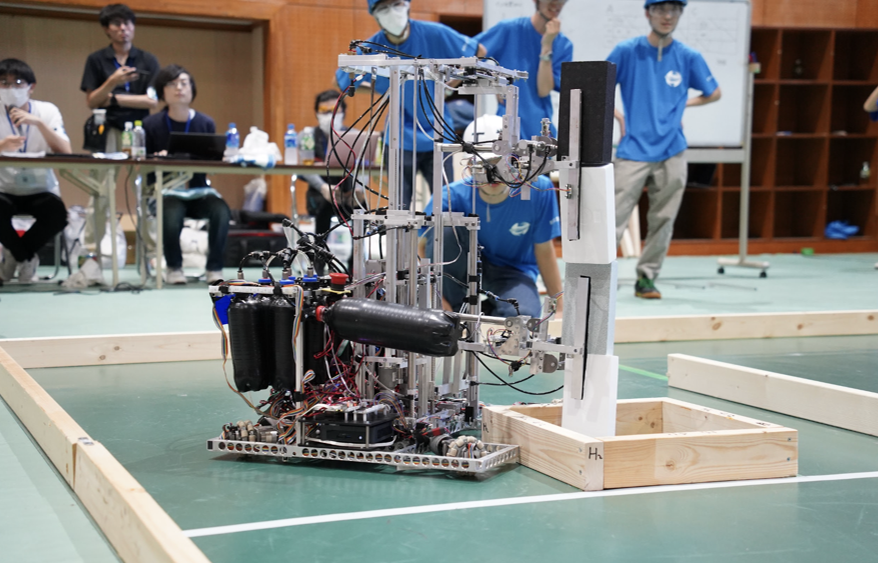
機体紹介
ここからは、私達が初めて製作したロボット「Bricolaje」について紹介していきたいと思います。
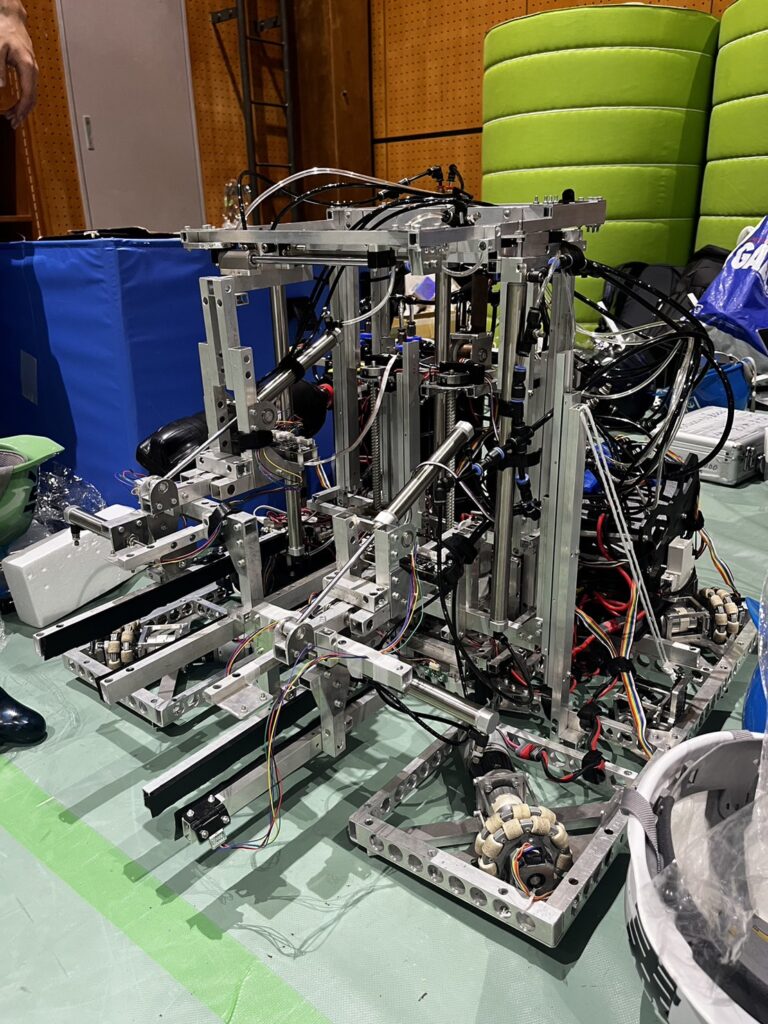
「Bricolaje」は、スペイン語で「日曜大工」という意味です。
「Bricolaje」についてお伝えしたいことはたくさんありますが、今回は厳選して5つの魅力を紹介していきたいと思います。
縦アームで16階建と8階建の両方を使用可能にしたこと
アイデア会議内で16階建てを狙うのは厳しいのではないかという意見が多かったため、安定性を考え16階の建設だけでなく8階建ての建設もできるように設計しました。 しかし、思っていたよりも16階建てが狙いやすかったため、最終的に8階建てを使用することはありませんでしたが、テスト走行時に他チームからおおおという歓声が聞こえてきたのは嬉しかったです。
横アームのミニシリンダーでハンドによって移動が阻害される問題を解決したこと
「Bricolaje」の両ハンドは、それぞれ機体の外側の面が動くため、16階建てを建設する際には、ハンドのみで横移動を行うことができません。 そこで、小さなエアシリンダーを横アームに取り付け、上ハンドの位置をレンガを拾う位置 、縦に積む位置 、設置後横にも余裕を持たせる位置といった3つの位置取に動かせるようにしました。 このシリンダーにより、設置後の後退がスムーズになり、時間の短縮に繋げることができました。
アームの自動化の実装、自動走行をほぼ完成させたこと
機体の修理や体育館練前などの隙間時間で、元々完成していたアームのプログラムを自動化に書き換え、計測輪を用いた自己位置推定とジャイロセンサーの利用により、各地域間を自動走行できるようにしました。 本番の約一週間前に実装したため、時間が足りずに精度を上げることができなかったのは心残りです。
Scoutを使えるようにしたこと
Scoutは最大で4つの距離測定センサのデータを処理し、そのデータをパソコン側に送信するための基板です。 精度もそこそこ出るため、夏ロボでは最終的には全く使われなかったものの、これによって半自動制御をほぼ可能にしました。距離センサを使うにあたり、開発が途中で止まっていた基板があったのでその開発を引き継ぎ、使用できるところまで持っていきました。 本番までの数ヶ月でMaquinistaの回路やプログラム周りの環境を1から学び、基板の回路を読み解いたりMaquinistaのプログラム環境を調べたりしました。 中には回路に関して想定外のミスがありましたが、なんとかごり押しして解決することができたので良かったです。
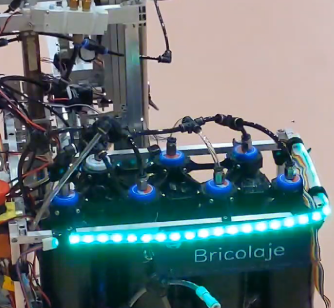
ゲーミングブリコ
ゲーミングブリコは、深夜練(深夜に体育館を占拠して本番環境で練習をすること)に謎のテンションで実装された、きらきらと眩しい7色に光り輝く機体です。 光度の制御が不可能で、高速で色が変わるといった性質により、明るすぎたり直視すると目に良くなかったりという欠陥があります。 チームメンバーの思い付きでLEDテープを付けましたが、結果的にインジゲーターとしての役割を大いに果たしてくれたので感謝しています。 ゲーミング機能大事。 動画を掲載したかったのですが、容量オーバーで載せることができなかったため、画像を添付します。
まとめ
今回は、私達にとって初めての大会である関東夏ロボコンについて紹介しました。残念ながら、今回は1勝もできず、予選敗退という結果に終わってしまいましたが、今回の反省を活かして、春ロボではもっといい結果を残せるように頑張りたいと思います。
今回協賛していただいた、STマイクロエレクトロニクス様、株式会社アールティ様、ウルト・エレクトロニクス・ジャパン株式会社様。 そしてこのような大会の場を提供していただいた関東春ロボコン運営委員会の皆様、本当にありがとうございました。 素敵な夏の思い出となりました。