
これはロ技研秋のブログリレー2020の10回目の記事です。
こんにちは、2018年度入学、工学院機械系のたくぽんです。Maquinistaでは機械班に所属しており、今年のプロジェクトリーダーを務めています。
この記事では、前回のキック機構の製作記に引き続いてオンライン!学ロボFESTIVALに登場したロボット「Ronnie」に搭載されている、キックボールをフィールドに設置する機構について紹介していきます。なかなかな面白機構になっているので、最後まで読んでいただけたらと思います。
これから紹介するボール設置機構
この動画で縦向きのボールを横向きにしている機構が、今回紹介するボール設置機構です。
画面左のリボルバーに装填されているボールを、teeの上に設置します。
ここからは、このような機構になった経緯や製作の流れを紹介していきます。
ボールの向きとコンセプト
先ほどの動画を見て、「ラグビーボールの向き、普通と90°違くない?」と思いませんでしたか?実際オンライン!学ロボFESTIVALに動画を投稿している27校の中で、ボールを横向きにしてキックしているのは東工大だけでした。
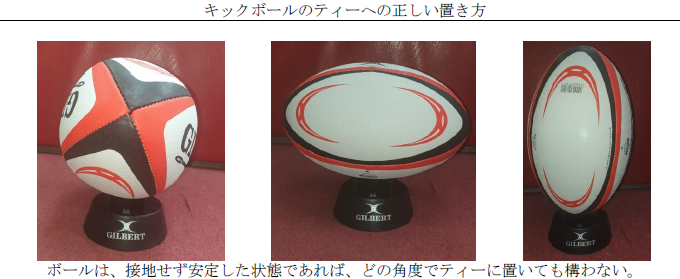
もちろんこれには理由があり、キックの実験時にボールを横向きにしたほうが分散が少なくなるという結果が得られたことに由来します。ボールを縦に置くと、キック機構の位置や角度のわずかなズレでもボールの飛距離や軌道が大きく変わります。また、キック方向へのボールの傾きも考える必要が出てきます。逆にボールを横に置いたときは、多少キック位置がずれていてもまっすぐ飛び、ボールの回転によって空中での姿勢も安定します。
そこで、完璧な姿勢にボールを縦置きするのではなく、少々ずれていても問題ないような姿勢(横置き)にボールを設置するというコンセプトで設計を進めました。
ルールに沿うアイデアを考える
3連続キックを行うときには機体にボールを3つ搭載するのですが、ロボットが自動で3つを設置できる必要があるのか、ボールが搭載されてさえいれば良いのかが不透明でした(結局後者で、ここはもっと早くFAQを出すべきだったという反省点)。競技完遂にリトライ必須ではないコンセプトで進めたいという思いもあり、3つのボールを搭載できるリボルバーからteeの上にボールを移動させてキックを行うというアイデアに至りました。
ロボットへのボールの搭載しやすさやスペースの関係でリボルバーにはボールが縦向きに装填されることになり、ボール設置機構に求められる大まかな動きが決定しました。ここからはもっと詳細に機構の動きを考えていきます。
させたい動きから機構を考える
- ボールをリボルバーから引き抜き
- ボールが横向きになるよう回転させて
- teeの上に置く
これがさせたい動きです。ボールを掴むのは可動部の重量や占有スペースの関係で厳しかったので、吸盤と真空ポンプを用いて吸い付けて移動させることにしました。
また、「ボールを引き抜く動き」と「ボールを回転させる動き」は、それぞれ独立に動かすことは無いので、一つのアクチュエータで引き抜きと回転ができるようにしたいですね。この時点で機構に求められている動作を整理すると、
- リボルバーに搭載されたボールに向かって吸盤を押し付ける動きができる
- teeの上にボールを置いたとき、吸盤の位置がボールの上面になる
- ボールをリボルバーから引き抜くときは、ボールの回転を少なくする(そうしないとリボルバーとボールが干渉する)
- teeにボールが触れるとき、ボールが回転方向の速度を持っていてはいけない(そうしないとteeが横に動く力がかかり、ボールとteeの干渉も起きる)
- これらの動きをアクチュエータ一つで行う
となります。これらを満たすようなボールの動きを考えると、自分は図のような動きにたどり着きました。
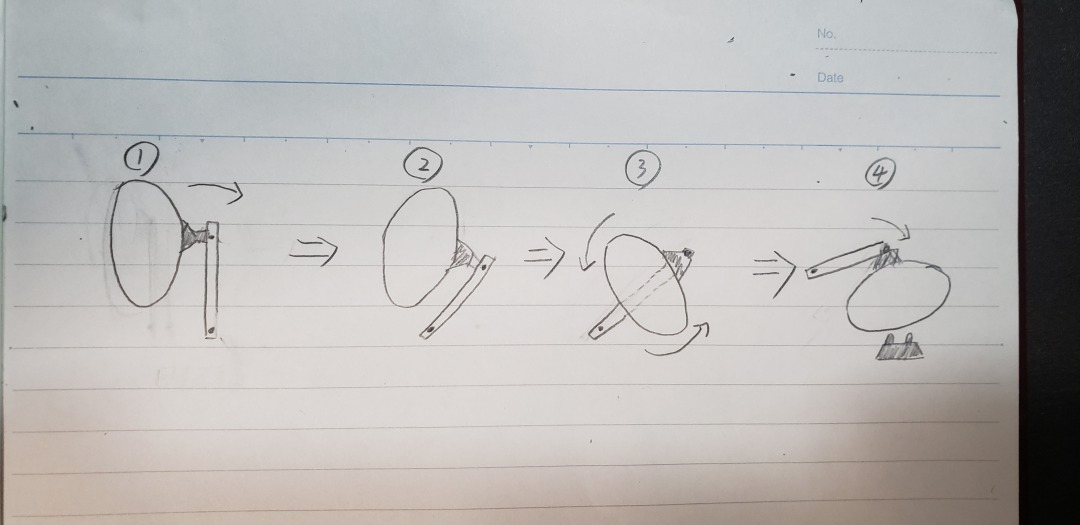
①ボールに吸盤で吸い付き、下側の軸を中心に回転しはじめる
②リボルバーからボールを取り出すまでは回転半径の大きい下側の軸を中心に回転する
③でボールが上側の軸を中心に180°回転する
④180°回転後、下側の軸を中心にボールが回転する(teeには真上から接触する)
させたい動きの詳細が決まったので、さっそく機構を設計します。ここにはいろいろな試行錯誤がありました。
案1: 間欠歯車
一部が欠けた歯車を用いて、間欠運動を行おうとしました。
このように青色の角材がエアシリンダによって90°揺動するのですが…
その過程で裏側の歯車が仕事をし、吸盤部分が間欠回転するようになっています。
①0°の時(リボルバーに吸盤が触れるとき)に吸盤でボールに吸着
②0°~15°の間は歯車が回転しない=ボールは吸盤がついている軸では回転しない
③15°~75°の間に歯車が回転=吸盤がついている軸が回転=ボールが回転
④75°~90°の時は歯車が回転しない=ボールは吸盤がついている軸では回転しない
このような仕組みで所望の動きを得ています。ただ、②・④の時に歯車の回転を拘束しているのは曲面の接触だけなのでガタがひどく、完成後すぐに改良に着手しました。
案2: ゼネバ歯車(3スロット)
間欠運動といえばゼネバ歯車!ということで、先ほどの一部が欠けた歯車をゼネバ歯車に交換しました。
ゼネバ歯車は、回転するピンがスロット(溝)に入ることで間欠的な回転を生み出す機構です。
角材が60°回転する間に吸盤は180°回転してほしかったので、スロットの数が3つのゼネバ歯車を選択しました。
動かしてみたところ、ガタの少ない間欠回転は実現できていました!しかし、吸盤側の軸にトルクがかかるとピンがうまくスロットに入らずに引っかかってしまいます。実際はボールにかかる重力によって軸にトルクがかかるので、これでは使い物になりません。
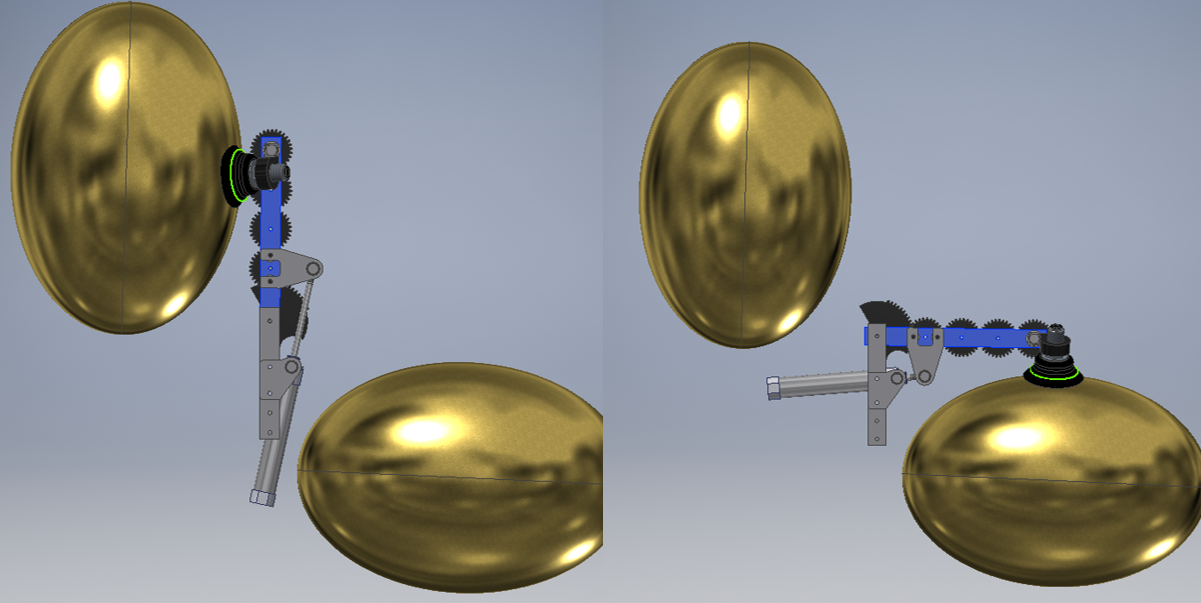
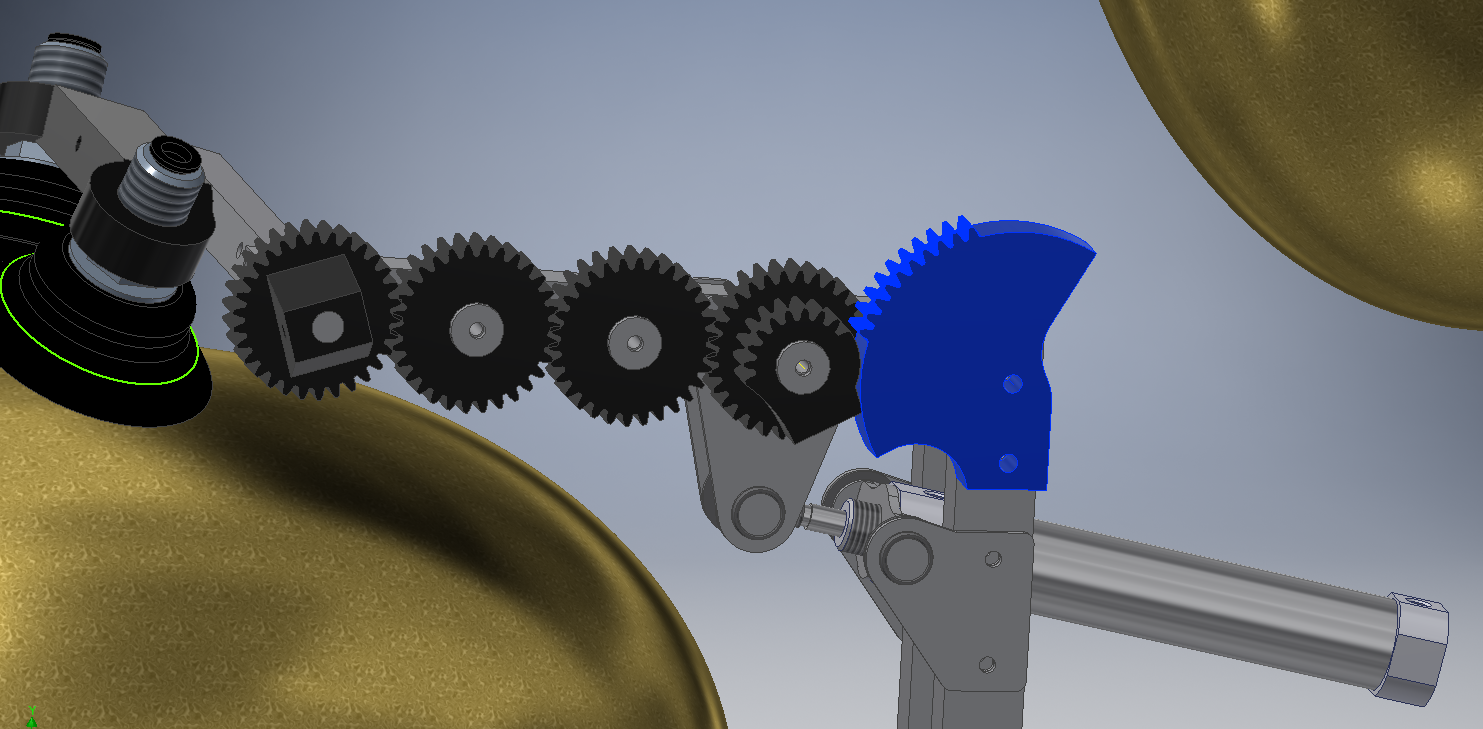
最終案: ゼネバ歯車(6スロット)
そこでゼネバ歯車のスロット数を6にし、溝の長さを長くしました。これによってピンが常にスロット内に留まるようになり、引っかかる心配はなくなりました。スロット数が半分に減ると吸盤の回転角度も半分になってしまうので、歯車で2倍に増速しています。
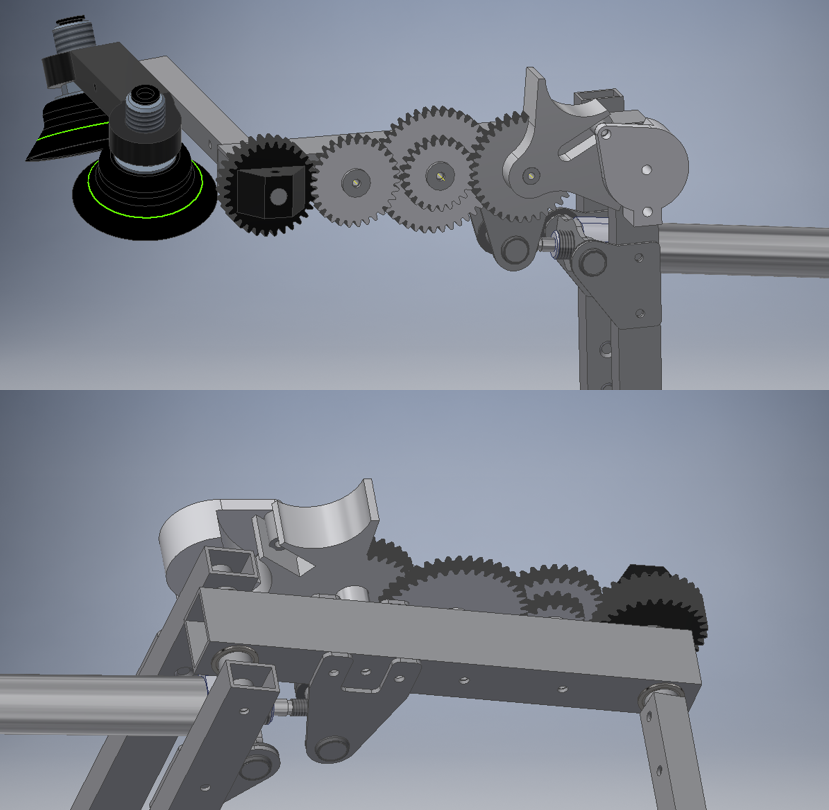
↓は初めて動かしたときの動画です。いい感じ!
この後吸盤やバックラッシの調整等をして完成したのが冒頭の動画の機構です。適当に回転させてるように見えて、意外と複雑なことをしてたんですよ。
おしまい
あまり面白要素のない真面目な文章になってしまいましたが、楽しんでいただけたでしょうか?なんとなくの設計や改良の流れをさらえたかなと思います。
今回の機構のような複雑な動きを機械的に実現するのが自分の好みですが、他大学のロボットを見てるとシンプルな機構で必要な動作を実現していて、まだまだ精進が必要だなと感じました。
今年はもっとすごいの作るぞ!ではまた!
小原歯車工業の小原と申します。歯車の機構に興味を持ちました。これはプラスチック製で成型でしょうか?
返信が遅くなりすみません。
これらの歯車はPETGフィラメントを用いた3Dプリントで制作しています。
特殊形状の歯車であること、リテイクが多くなると考えられること、さほど大きな力がかからないこと等の理由から、外注せずに自作できる3Dプリントを選択しました。
また、歯車の設計には貴社のGCSWを使用させていただいています。