明けましておめでとうございます。
今年もMaquinistaをよろしくお願いいたします。
リーダーのバンルです。
12月7日に白星会の方々による学生サークル交流会に参加させていただきました。
次回もぜひ参加させていただいたいです!
また、多大なるご支援ありがとうございます。
今年も、2回目の優勝を目指して頑張ります!

東京科学大学NHKロボコンチーム公式ブログ
明けましておめでとうございます。
今年もMaquinistaをよろしくお願いいたします。
リーダーのバンルです。
12月7日に白星会の方々による学生サークル交流会に参加させていただきました。
次回もぜひ参加させていただいたいです!
また、多大なるご支援ありがとうございます。
今年も、2回目の優勝を目指して頑張ります!
このページでは、MaquinistaのNHK学生ロボコンの戦績を一覧で表示しています。
大会の詳細ページや振り返り記事では、ロボットの動画を掲載しています。画像をクリックしてみてください。
NHK学生ロボコンとは:こちらのページで説明しています。
Harvest Day
予選リーグ敗退
特別賞 マブチモーター株式会社賞 受賞
NHK学生ロボコン2024 結果報告&総括
Casting Flowers over Angkor Wat
予選リーグ敗退
特別賞 マブチモーター株式会社賞 受賞
NHK学生ロボコン2023 結果報告&振り返り
LAGORI ~ラゴリ~
2次ビデオ審査不合格
NHK学生ロボコン2022結果報告
投壺~トゥフー~
予選敗退
NHK学生ロボコン2021結果報告&振り返り
ROBO RUGBY
特別賞(協賛、トヨタ自動車株式会社)
ロボット技術研究会がオンライン!学ロボFestivalで特別賞 : 東京工業大学の公認学生サークル「ロボット技術研究会」の部員で構成するチームMaquinista(マキニスタ)が、9月26… https://t.co/ajCvlzeuZb
— 東京工業大学 (@tokyotech_jp) October 30, 2020
GREAT URTUU
予選敗退
NHK学生ロボコン2019 結果報告&振り返り
NÉM CÒN
ベスト8
2018年大会
The Landing Disc
NHKロボコン
優勝
ABUロボコン
ベスト4・敢闘賞
2017年大会
CLEAN ENERGY RECHARGING THE WORLD
予選リーグ敗退
ROBOMINTON:BADMINTON ROBO-GAME
2次ビデオ審査不合格
A SALUTE TO PARENTHOOD
ベスト8
THE GREEN PLANET
グリーンプラネット
2次ビデオ審査不合格
In Pursuit of Peace and Prosperity
平安大吉(ペンオンタイガ)
予選リーグ敗退
Loy Krathong, Lighting Happiness with Friendship
ロイ・クラトンの火をともせ!
ベスト8
Robo-Pharaohs Build Pyramids
ロボ・ファラオ ピラミッドを築け
ベスト4・技術賞
Travel Together for the Victory Drums
旅は道連れ 勝利の太鼓を打て
書類審査落選
Govinda
ゴヴィンダ
予選リーグ敗退
Halong Bay Discovery
ハロン湾の伝説
ベスト4
Building the World’s Tallest Twin Tower
ツインタワー・ビルダー
1次審査(書類審査)不通過
Climb on the Great Wall Light the Holy Fire
万里の長城を照らせ!
予選リーグ敗退
Reunion of Separated Lovers “Gyeonwoo & Jiknyeo”
織姫と彦星
3回戦敗退
Takraw Space Conqueror
タクローの覇者
2回戦敗退

NHKのロボット紹介動画
技術交流会でのパフォーマンスの様子(3:09頃から)
Misumiものつくり支援
https://www.misumi.co.jp/st-project/interview/36/

最速APPRE達成の様子
チーム紹介ビデオ
一次審査(1月)提出動画
二次審査(4月)提出動画
優勝チームとして、様々なメディアに取り上げていただきました。
https://www.titech.ac.jp/news/2017/038670.html
https://pages.rohm.co.jp/dp-robocon2017-kaibo.html
https://deviceplus.jp/people/robocon2017-winner-tokyotech/
https://pc.watch.impress.co.jp/docs/news/1094591.html
https://mainichi.jp/articles/20171205/dde/012/070/004000c
https://www.ohmsha.co.jp/robocon/
https://passnavi.evidus.com/keisetsujidai/
皆さんこんにちは、Maquinistaリーダーのバンルです。
今年の7月6日に川崎市立井田小学校でロボコンワークショップを行いました!
井田小学校でロボコンワークショップを行うのは2017年に引き続き2回目で、とてもありがたいです。
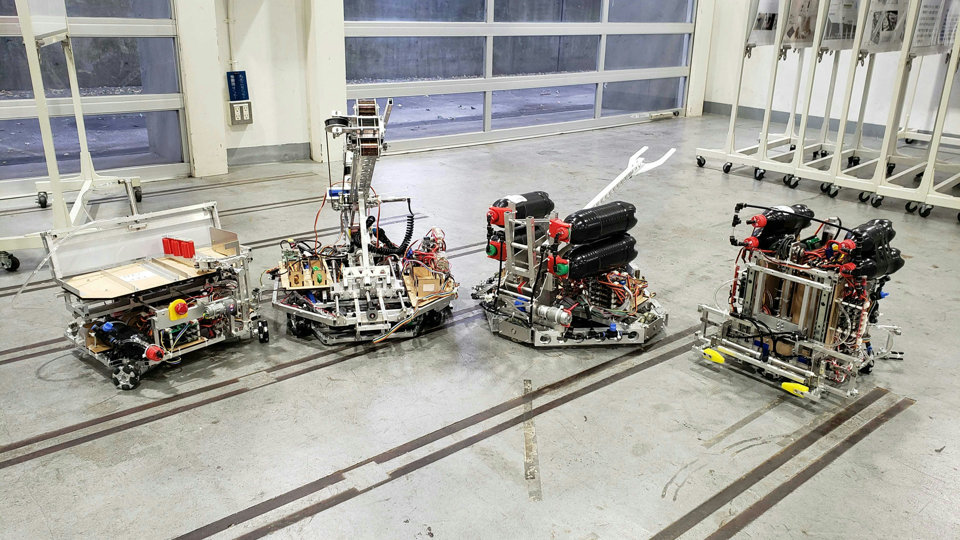
当日はプレゼンだけでなく、実際にMR1とMR2の両機体を動かしました。
今回のロボコンワークショップで、1人でも多くの人がロボコンに興味を持ってもらえたなら幸いです。
皆さん、こんにちは
19プロジェクトリーダーの苗村です。
結果を先に言いますと、Maquinistaは予選ブロックで2敗という結果で2019大会を終えました。
まずはそれぞれの試合について振り返っていこうと思います。
Maquinistaは予選Cグループに入り、豊橋技術科学大学さん、京都大学さんと同じ組になりました。
予選2戦目( vs京都大学さん)
MR1がスタートと同時に勢いよく動き出しましたが、壁と激突
壊れた部分を直して調整し試合終盤になんとか復旧し動き始めましたが、ゲルゲの受け渡しに失敗。
その間に京都大学さんがウーハイを達成し敗退となりました。
壁と激突した原因ですが、計測輪のエンコーダが1つ読めていませんでした。
MaquinsitaのMR1は自動制御で動く方式だったのですが、ロボットが自分の位置をきちんと把握できていなかったため壁と激突してしまいました。
この時点で京都大学さんが予選2勝となり、Maquinistaは予選敗退が決定しました。
予選3戦目( vs豊橋技術科学大学さん)
この試合では無事にMR1は動き出し、ゲルゲの受け渡しエリアまでたどり着くことができました。
しかし、ゲルゲの受け渡しがうまくいかずそこでリトライ
何とか受け渡すことができたのですが、今度はMR2が自分の位置をきちんと把握しておらず段差手前で停止
何度かやり直してみるも段差を超えることができませんでした。
結果、3分が経ち段差をクリアした豊橋技術科学大学さんに敗退となりました。
予選2敗で敗退という結果はここ4年間で最低の結果であり、本当に悔しく思っています。
また、応援していただいた皆様に対して本当に申し訳なく思っています。
Maquinistaは今大会で4輪ステアを含め様々な新しいことにチャレンジしてきました。
この技術の積み重ねが数年以内には必ず花開き、再び優勝することができると私は確信しています。
今大会をもちまして私を含め4年生(16)は引退となります。
今までチームメイトとして一緒に戦ってきた14~18の皆さんやライバルとして共に戦ってきた他大学の皆さん、そして応援してくださった皆さん、本当にありがとうございました。
16を代表してお礼申し上げます。
また、今回の大会では様々な企業の方にご支援いただきました。
北陽電機社様には大変高価な3次元測位センサを無償でお借りさせていただきました。精度の良いセンサが求められる中で、高精度なセンサを利用することができ大変助かりました。お借りさせていただいたこと大変感謝しております。
ミスミ社様には学生ものづくり支援としてミスミ社様の製品を無償で使用させていただきました。気軽に購入することが困難である高価な部品をご支援いただき、大変感謝しております。
その他、今まで活動の場を提供してくださったロボット技術研究会とものつくり教育研究支援センターの方々をはじめとして、大学の関係者には大変お世話になりました。この場を借りてお礼を申し上げます。
金銭的に厳しい学生団体であるMaquinistaにご寄付をしてくださった皆様もとても感謝しております。おかげさまで機材の購入や十分な試作、大会ユニフォームの製作等をすることができました。この場を借りてお礼を申し上げます。
最後になりますが、2019年大会の機体の動画をこちらに公開しております。是非ご覧ください。
今後とも東京工業大学Maquinistaをよろしくおねがいします。
皆さんこんにちは、Maquinista回路制御班のおがたです。
ついに令和初のNHK学生ロボコンまで残すところあと1日となりました。
“いよいよ明日は大会です!” の続きを読む
皆さんこんにちは、Maquinista 機械班兼広報を担当しているMassaです。
あと1週間で”平成”が終わってしまいますが、Maquinistaは”令和”最初のNHK学生ロボコンで優勝するべく日々練習を続けています。
さて、NHK学生ロボコン2019の2次ビデオ審査の結果が届きました。
結果は…
こんにちは、リーダーの苗村です。
まずは新入生の皆さん、東工大入学おめでとうございます!
東工大でものつくりをしたいという新入生の皆さんにおすすめのサークルがあります!
その名もMaquinista!!
MaquinistaはNHK学生ロボコンに向けて活動しているチームです。
NHK学生ロボコンとは全国の大学、高専が参加するロボットコンテストです。
そしてNHK学生ロボコンで優勝すると、日本代表としてABUアジア太平洋ロボットコンテストに出場できます!
MaquinistaはNHK学生ロボコンでの優勝、そしてABUロボコンでの優勝を目指して活動しています!
2017年にはNHK学生ロボコン優勝、ABUロボコンベスト4
2018年ではNHK学生ロボコンベスト8
と、実績も十分なチームです!
ロボット製作が初めての方、大歓迎です。
チームとして活動しているため、先輩から教えてもらうことができます。
また、講習会も充実していますので安心です!
現在は5月26日に開催されるNHK学生ロボコンの2次ビデオ審査に向けて活動しています。
詳細については言えませんが、見学に来られた方には詳しくご案内しています!
Maquinistaの4月の予定は以下の通りです。
4/4(水) 練習 10:00~20:00 @EEI棟1階スペース
4/7(日) 練習 9:00~12:45 @体育館
4/13(土) 練習 13:15~17:00 @体育館
4/17(水) Maquinista入会説明会 13:30~ @ものつくりセンター
4/24(水) Maquinista入会説明会 13:30~ @ものつくりセンター
4/25(木) 4月部会(ロ技研) 17:00~ @W241
4/30(火) 練習 12:00~15:00 @体育館
このほかにも毎週月曜と火曜にはS621もしくはS622にて定例会を行っています。
またものつくりセンターで普段から活動しているため、いつでもお気軽にお越しください!
皆さんと一緒にロボコンができる日を楽しみにしています!
一緒に日本一、そして世界一を目指しましょう!!