
こんにちは。関東春ロボコン(通称春ロボ)でリーダーを務めた、25年度入学で機械班の25-Tsugeです。
2026年3月19日に高尾の森わくわくビレッジにて開催された関東春ロボコン2026に、Maquinistaから1年生のチームで参加しました。
私たちMaquinistaは準優勝することができました!
たくさんの応援ありがとうございました!
準優勝した私たちの機体紹介をぜひ見ていってください!
大会について
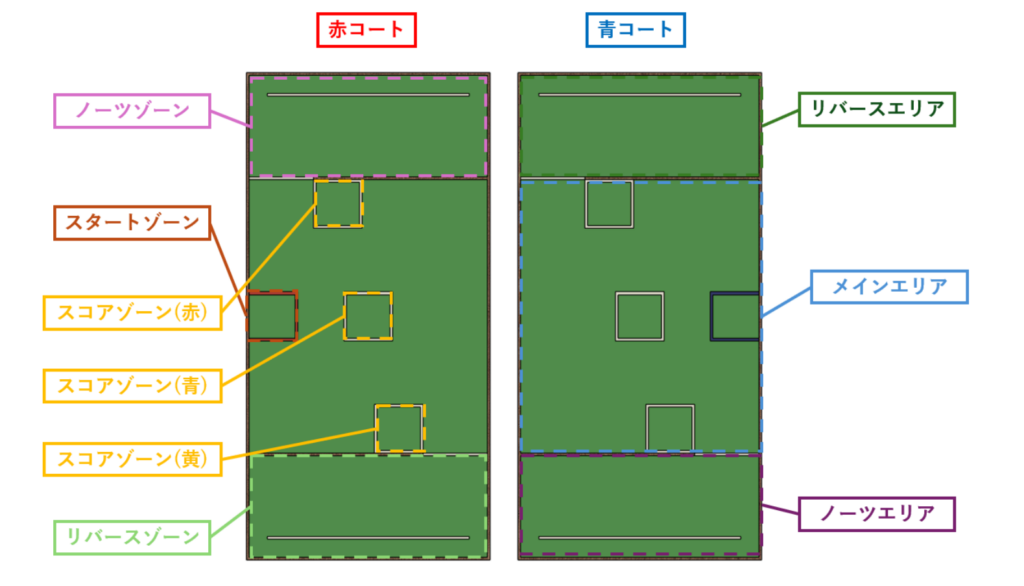
今回の競技課題は「10周年の祝奏(ファンファーレ)」です。相手チームが配置した3色のノーツ(カラーボール)を自動で見分けて、色ごとに決められたスコア(箱)に入れていきます。決められた個数を先にスコアへ入れたチームが「ファンファーレ」達成となり、勝利となります。3色のノーツをどのように見分け回収するか、ノーツをどうしたら素早くスコアに入れられるかが鍵です。
(https://kantouharurobo.com/static/haru/2026/KantouHaruRobocon_2026_Rule_5.00.pdf)
機体概要
私たちはフィールドに置かれたノーツを1個回収するたびに、その場で即座に射出するという作戦でロボットを開発しました。複数のボールを同時に回収するのでなく、一個ずつにすることで、一つ一つの動作をシンプルにすることができ、移動距離を減らすことができます。またどこからでも射出することができるため、相手のボールの配置の影響を受けにくくなることもポイントです。
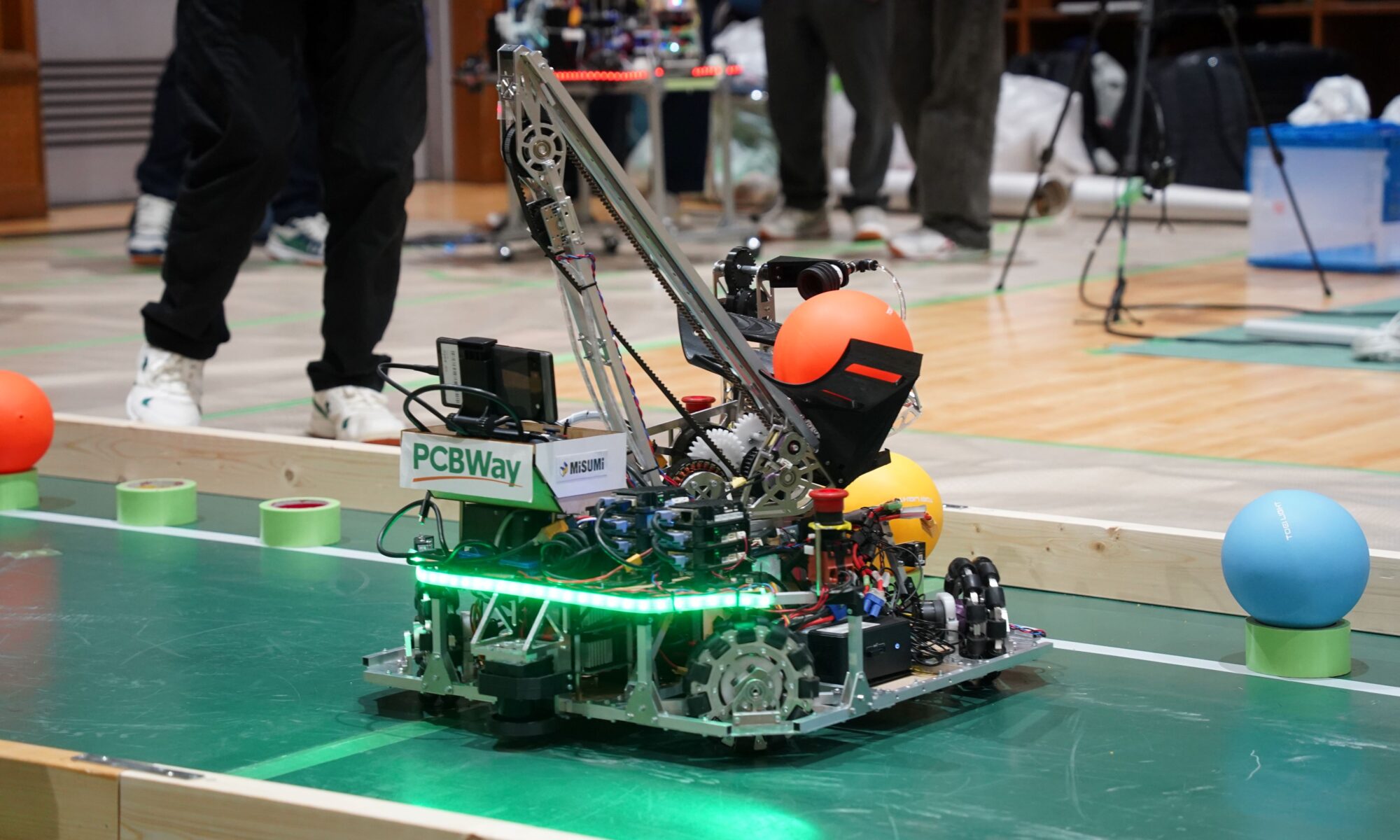
ロボット名は「Canon(カノン)」。祝奏曲で有名なカノンと大砲を意味するキャノンを掛けて命名しました。
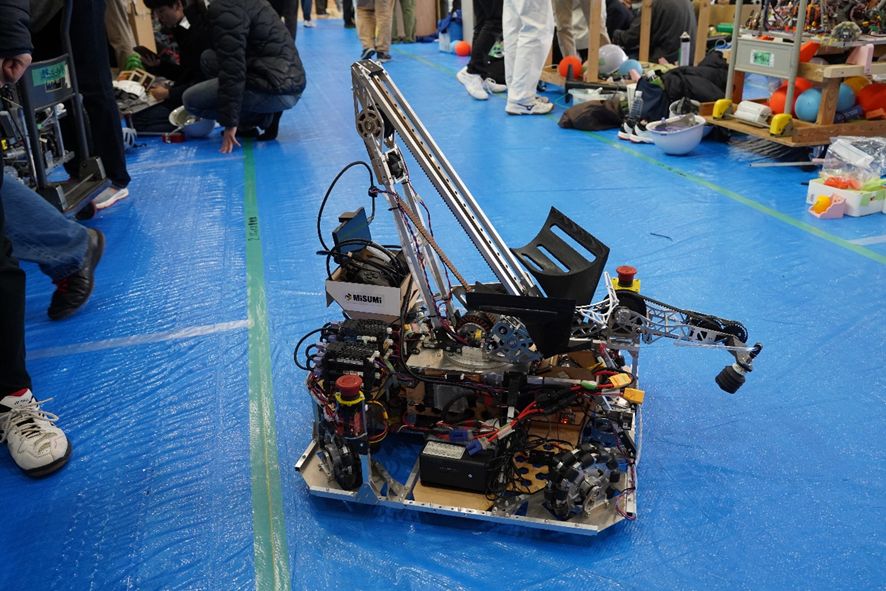
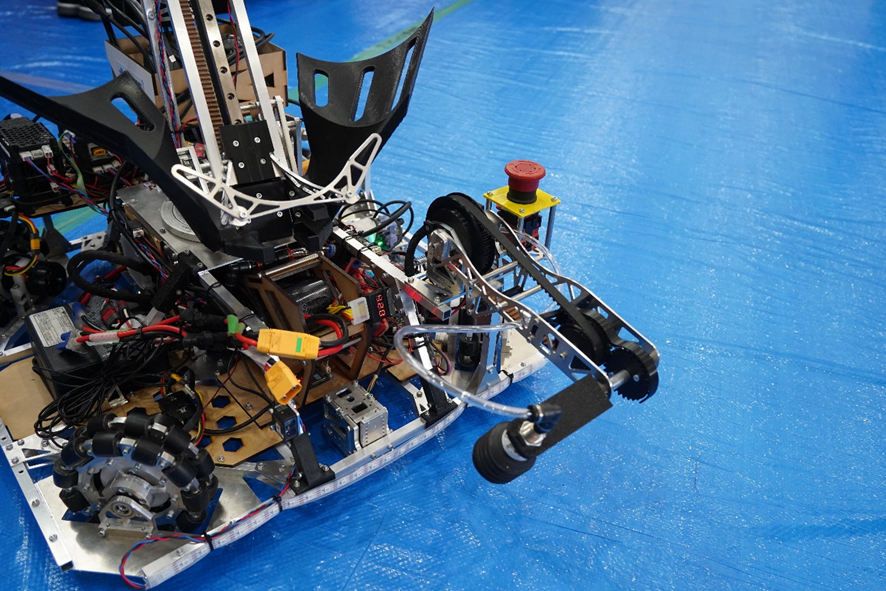
実際のロボットはこんな感じ。
機体中心にはモーター2つを機械的に連結させた強力な射出機構が搭載されています。後方には特殊な動きをする回収機構があり、ノーツを回収後射出機構にそのまま装填することができるようになっています。
回収機構
ノーツの配置を相手が決めるため、どのような置き方でも安定して回収できるように吸盤が採用されています。射出機構への高さと回収のリーチを確保するため、吸盤がアームの回転に従動して動くように工夫しました。
射出機構
モーターでタイミングベルトを回転させて、リニアガイドを用いたキャリッジを動かすことでノーツを射出する、ベルト直動機構を採用しました。モーター2つをギアにより機械的に連結することで高いトルクを実現しています。これにより、ノーツが置かれているエリアから3か所全てのスコアを狙うことができます。またターンテーブルにより機体の向きを変えずに射出することが可能です。
足回り
機敏な方向転換を必要としないため、4輪オムニホイールを採用しました。なお、使用したオムニホイールは前回出場した大会である関東夏ロボコンにてBチームが使用していたものを改良したものです。
制御
計測輪とジャイロセンサー、高性能センサーである2D Lidarによってフィールド上での自己位置を取得することができます。これらによりロボットの完全自動走行が実現されています。
色の認識にはカラーセンサーを用いています。細やかな設定が可能で、当日の環境の変化にも柔軟に対応可能です。
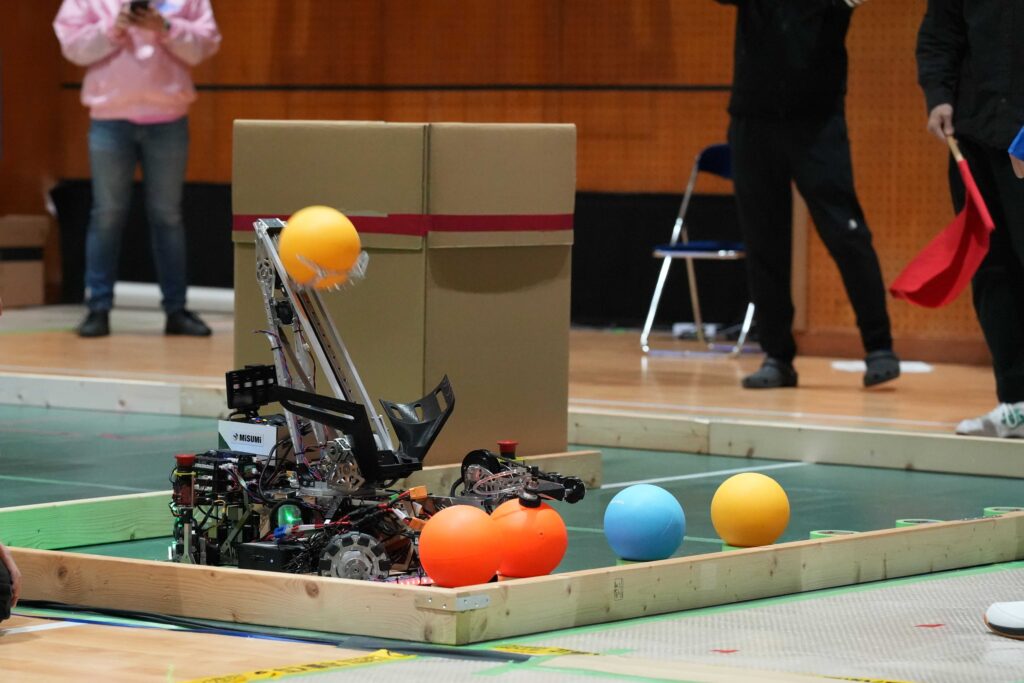
全体の流れ
ノーツを認識するとロボットが停止し、ノーツを吸着し回収します。その後ノーツを射出機構に装填。そして現在地点から狙った箱への距離と角度を計算して射出します。これを繰り返してファンファーレを達成を狙います。
練習中には最速達成タイム21秒を記録するなど、安定して20秒台の記録を出すことができる機体を作成することができました。
対戦結果
今大会では関東を中心とした大学、高等専門学校からMaquinistaを含めて計20チームが参加しました。
予選は3チーム7組のリーグ制で、各リーグの1位7チームと、ワイルドカード1チーム計8チームが決勝トーナメントに進みます。
- 予選1試合目 vs. 藤原こうふ店(慶応義塾大学)
Maquinistaが31秒でファンファーレを達成し勝利。
相手が不具合で動けない中、こちらは順調にノーツをスコアへ入れていき、ファンファーレを達成しました。 - 予選2試合目 vs. 牛乳プリン(東京工科大学)
Maquinistaが26秒でファンファーレを達成し勝利。
私たちが練ったノーツ配置が功を奏し、相手が回収・射出に手間取っている間にファンファーレを達成しました。
決勝トーナメントに全体順位2位で進出。
- 準々決勝 vs. 過デンリュウ(工学院大学)
Maquinistaが26秒でファンファーレを達成し勝利。
相手の射出ミスや速度差が重なり、先にファンファーレを達成しました。 - 準決勝 vs. オムオムΩ(早稲田大学)
Maquinistaが29秒でファンファーレを達成し勝利。
相手の動きも好調でしたが、こちらが速度で上回り勝利することができました。 - 決勝 vs. spArc(東京大学)
spArcが13秒でファンファーレを達成し敗北。
私たちの機体と同じようなコンセプトのロボットですが、練習の段階で私たちのベストタイムを上回るタイムを出していました。
それでも最後まで諦めず、ここまでよりも少し速度の出るパラメータ調整にして挑戦。
両者順調にノーツをスコアへ入れていましたが追いつけずに敗北しました。
最終結果と総括
私たちMaquinistaは今大会で決勝トーナメントに進み、準優勝することができました。
実は、輸送前日や大会前日に大きな機械の不具合が起こり、一時は本番でまともに動くかどうかさえ怪しい状態でした。しかしチームが一丸となってギリギリまで修正した結果、なんとか持ち直し、試合では一度もミスすることなく理想的な動きをすることができました。
優勝することこそできませんでしたが、私たちを大きく成長させてくれた大会だったと思います。

謝辞
準優勝の副賞としてSTマイクロエレクトロニクス様からマイコンボードを頂きました。また、参加賞として同社様よりマイコン付属品を、ウルト・エレクトロニクス・ジャパン株式会社様からは付箋やメモ帳等を頂きました。この場をお借りして感謝申し上げます。
さらに、この大会という場を提供してくださった関東春ロボコン運営委員会の皆様、技術交流会で情報交換してくださった他大学のロボコニストの皆様にも深く感謝致します。
そしてMaquinistaに日頃よりご協力いただいているスポンサーの皆様、大学関係者の皆様にも厚く御礼申し上げます。いつも温かいご支援ご協力をありがとうございます。
次に私たちの代が出場するのは東海地区交流ロボコンです。次こそは優勝できるよう、チーム一同邁進してまいります。これからも引き続き応援よろしくお願いします!