
こんにちは。25年度入学機械班の25-yoshidaです。9/16(火)に高尾の森わくわくビレッジにて関東夏ロボコン2025(以下、夏ロボ)が行われ、東京科学大からはチーム「Maqui」として1年生8人が、チーム「Nista」として1年生9人が参加しました。
大会について
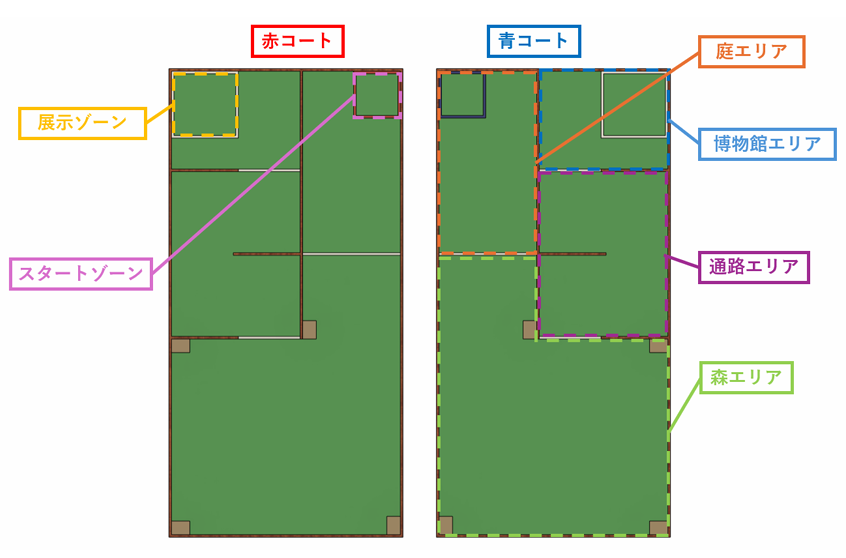
今回の夏ロボの課題は「高尾の森虫取りビレッジ」であり、ロボットによる昆虫採集と昆虫の展示をイメージしたゲームとなっています。以下は大まかな試合進行の説明です。
昆虫は、カブトムシ(灰色のホワイトボードイレーサー)、クワガタ(青色のホワイトボードイレーサー)、カナブン(白色の発砲スチロール)の3種類です。3分の制限時間の間に、カブトムシ1匹とクワガタ4匹を展示エリアに入れ、ロボットの点灯により合図を出すことで勝利(Vゴール/昆⾍図鑑完成)となります。
虫が配置されているエリアと展示ゾーンの間にはスラロームがあり、どのようにして虫を素早く移動させるかが勝負の分かれ目となります。
関東夏ロボコンルールブックより引用(https://kantouharurobo.com/natu/2025/KantouNatuRobocon_2025_Rule_2.00.pdf)
チームMaqui
機体紹介
チームMaquiでは、カブトムシはスタートゾーンから射出、クワガタはスラロームを通り運ぶ作戦でロボットの制作をしました。
以下では今回のロボットの特徴的な点について解説します。

カブトムシ射出機構
スタートと同時にカブトムシを展示エリアに射出することで時間の短縮を狙いました。定加重ばねを用いた射出で、ばねの強さを調整することでスタート位置から動かず展示エリアに射出できます。スタート時はばねが伸ばされた状態で固定されており、エアシリンダーでロックを外すことで射出する仕組みになっています。

クワガタ回収機構
アクチュエーターをエアシリンダー1本のみとしてクワガタの回収・設置を行います。エアシリンダーを引き戻す事でオブジェクトを回収し、伸ばすことによって設置を行います。なるべくシンプルな機構を用いる事で、安定感があり、素早い動作を実現しました。
自動走行
クワガタを展示ゾーンに運ぶためには3回スラロームを通る必要があり、走行距離が長くなります。そのため、自動走行を行い、安定して高速に走行ができるようにしました。オドメトリと2DLidarを用いた自己位置推定を行い、現在地を常に参照しながら走行するため、手動操縦に比べて高い再現性を発揮してくれます。
対戦結果
今回の夏ロボではMaqui、Nistaを含め計17チームが参加しました。
予選は総当たり戦で各チーム2試合ずつであり、上位6チームが決勝トーナメントに進みます。
予選1試合目 vs おいでよ!常盤の森(横浜国立大学)
おいでよ!常盤の森の昆虫図鑑完成(28秒)で敗北
ロボット自体は問題なく動かすことができましたが、相手チームのVゴールが想定よりも速く、643点で敗北となりました。自チームがVゴールの条件を達成までには32秒かかりました。
予選2試合目 vs 群情(群馬大学)
Maquiの昆虫図鑑完成(27秒)で勝利
大会最速Vゴールを目指し、1試合目よりも走行速度のパラメーターを上げて試合に挑みました。練習段階では試したことのない速度での走行でしたが、無事に27秒で昆虫図鑑完成を達成しました。このタイムは今大会最速タイのVゴールとなりました。
関東夏ロボコン大会結果スプレッドシートより引用(https://docs.google.com/spreadsheets/d/13Fuq1l-Md9j-2fGXjkKUH0BFgdTNQ3kKvs8O8efwpLs/edit?usp=drivesdk)
チームNista
機体紹介
Nistaでは、イレーサーを投げて移動時間を短縮することをコンセプトにして機体を開発しました。
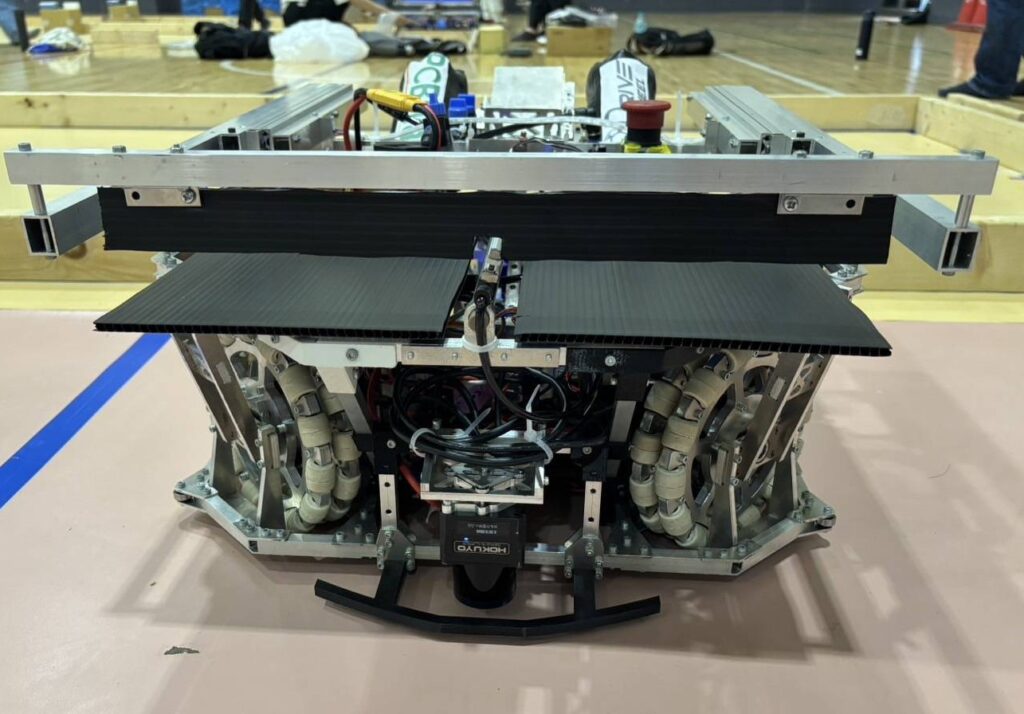
機体の名前は「鬼蜻蜓」。イレーサーを長距離飛ばせる点や巨大な機体から、飛行力が高く日本最大のトンボであるオニヤンマの名をつけました。
↑鬼蜻蜓。サイズ制限ギリギリの巨体が特徴。
ここからは、機体のいくつかの部分について細かく紹介していきます。
イレーサー発射機構
イレーサーの発射には、高速回転する2つのローラーを使っています。装填されたイレーサーを後ろから押し出してローラーの間に押し込むことで、イレーサーが加速して発射される仕組みです。この機構を使うことで、イレーサーを8m近い距離まで正確に発射することが可能となっています。
発射機構は、これの他にベルトを用いた機構も開発していましたが、大きさと装填のしやすさから、ローラー方式を採用しました。
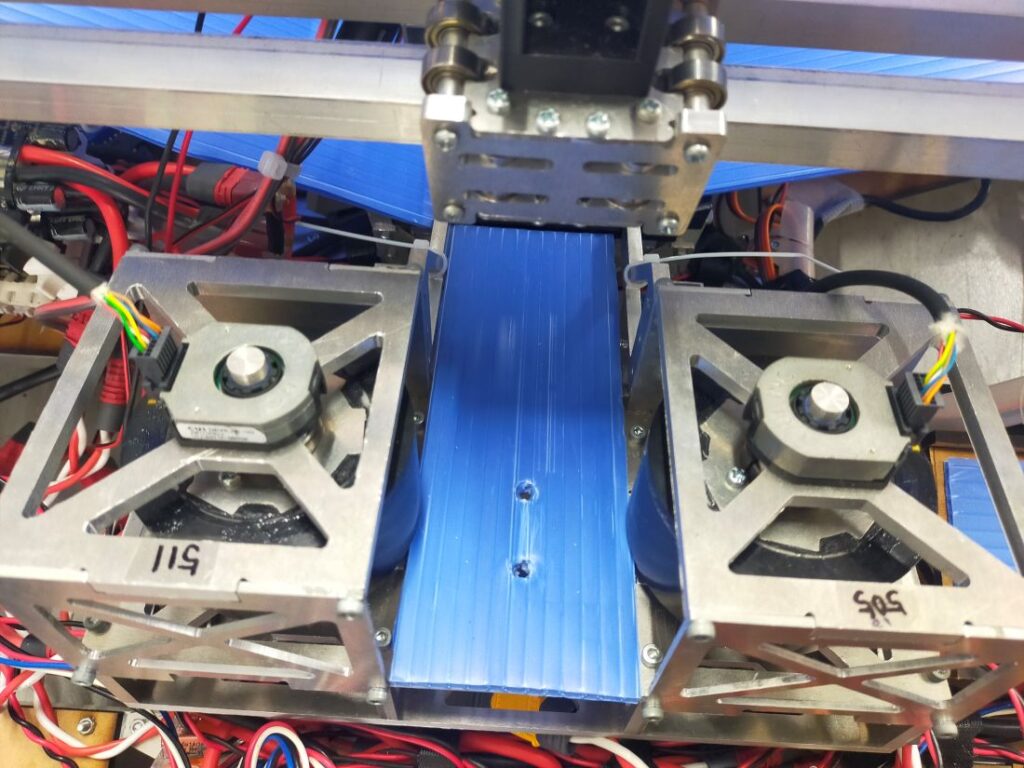
↑機体中央に配置された2つのローラー。どことなくトンボの目にも似ている?
イレーサー回収・装填機構
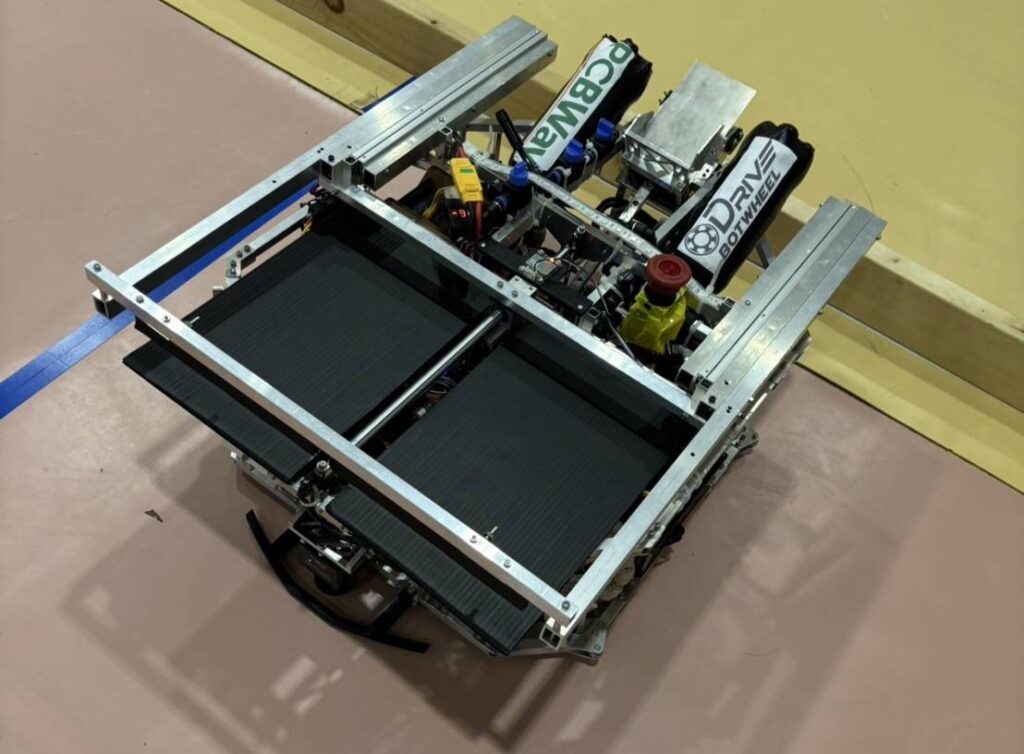
左右に動く大きなフレームと、その先についたフラップを用いて、イレーサーを機体内に引き込みます。機体内部には発射機構へとつながるスロープがあり、そこを滑り下りたイレーサーは発射機構へと装填されます。スロープの手前にはイレーサーを1つ保持できる空間があり、2つ同時回収も可能としています。
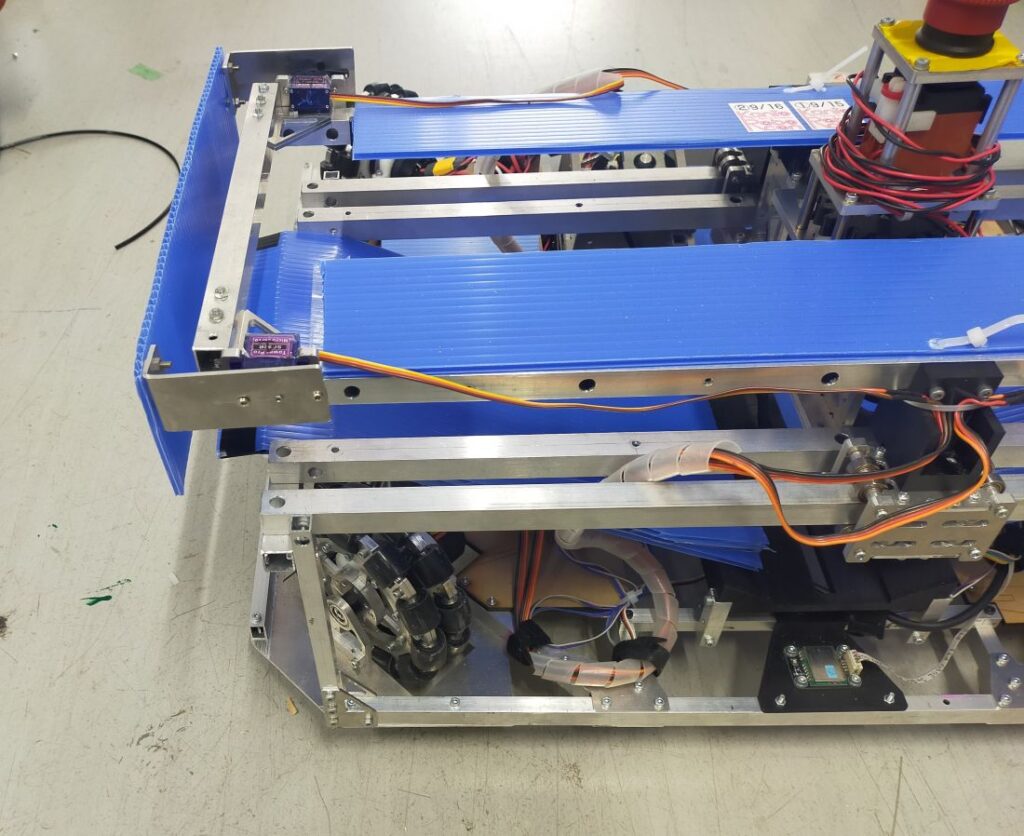

↑機体後方の回収機構。2枚目はフレームを伸ばしてフラップを上げた状態。
足回り
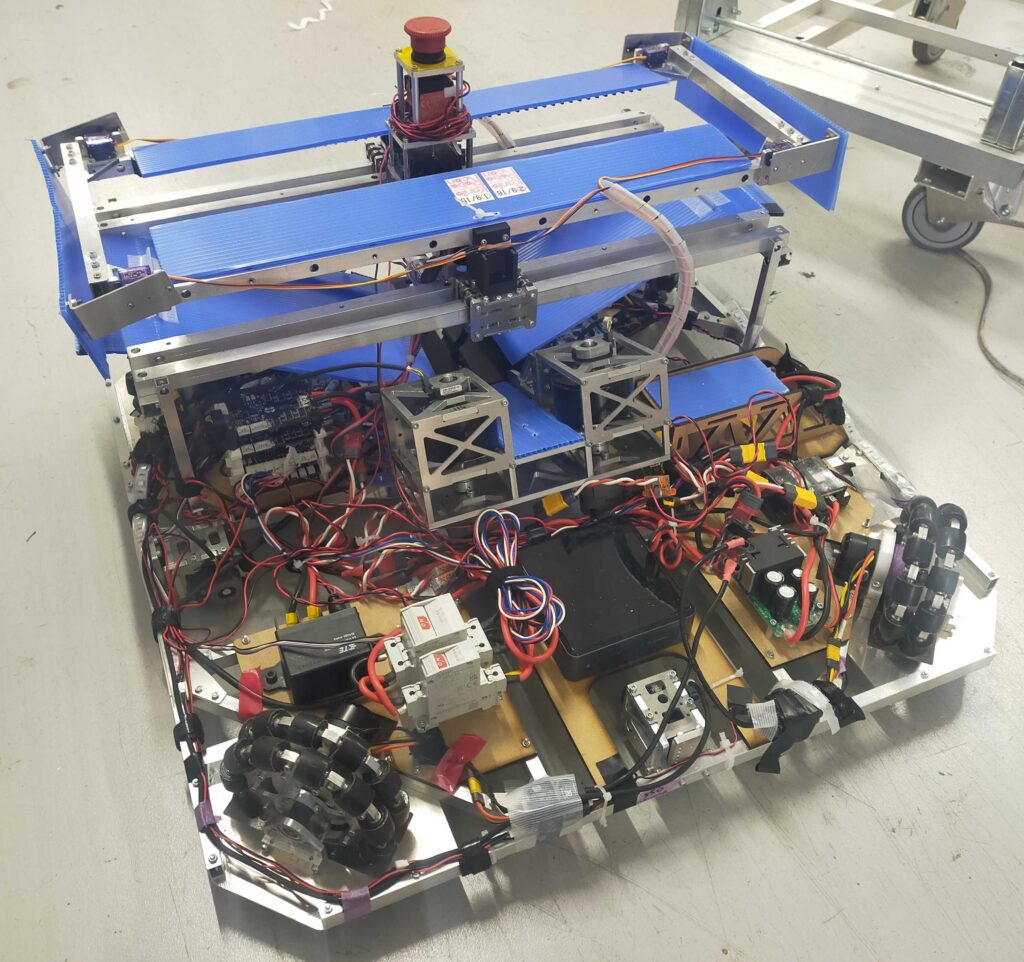
走行用に使用しているオムニホイールは、既製品ではなく自作したものを使用しています。機体全体で88個もの数を使用している黒いローラー部分は、担当者だけでなくチームのほぼ全員が作業を手伝って製作しました。
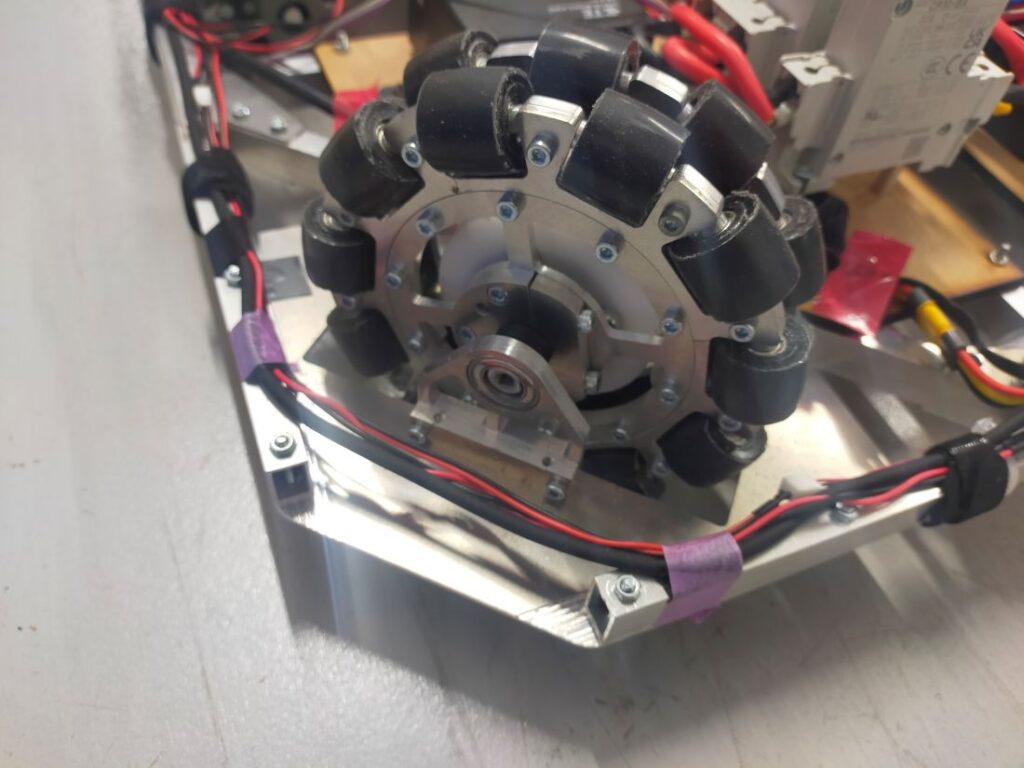
↑オムニホイール。アルミ製の本体部分から黒いローラー部分まで、全て自作。
対戦結果
予選1試合目 vs 昆虫ハンター ヒガコ(東京農工大学)
518-143で勝利
1回目の射出後に操作を間違えて虫を落としてしまいましたが、1つ虫を射出するのに成功しました。後半は足回りが不調になり上手く操縦できずにいましたが、リトライ後にそれが直り、さらに得点を重ねることができ、勝利に繋がりました。
予選2試合目 vs 信州の夏休み(信州大学)
268-518で敗北
合計4つの虫を回収するところまでは上手くいきましたが、射出後に虫が跳ねてしまい展示ゾーンに上手く入りませんでした。後半は足回りが全く動かず、その間に相手に得点されてしまい敗北となってしまいました。
最終結果と総括
予選でどちらのチームも1勝1敗となり、決勝トーナメントに進むことはできませんでしたが、ロボットの性能を十分に示す試合ができたと思います。また、Maquiの自動走行と今大会最速タイのVゴールを評価していただき、JFEスチール株式会社様より特別賞をいただきました。
今回、理想的な動きができ勝利した試合はありましたが、スケジュール管理や当日の動きなどに考え直すべき点が多くありました。機体完成が遅れたことにより練習時間が十分に確保できず、自動走行可能な速度・当日機体に起こりえるトラブルを把握できていなかったことが敗因となりました。また、当日のテストランや試走場の予約を含め、ピット内での動きと役割分担をあらかじめ考えておく必要がありました。今後はNHK学生ロボコンに向けてこれらの点を改善していきたいと思っています。
謝辞
JFEスチール賞の副賞として、JFEスチール株式会社様より工場見学ツアーにご招待いただく予定です。また、参加賞としてSTマイクロエレクトロニクス様からはマイコンを、ウルト・エレクトロニクス・ジャパン株式会社様からは付箋やメモ帳等を頂きました。協賛企業の方々、ありがとうございました。
この大会という場を提供していただいた関東春ロボコン運営委員会の皆様、交流してくださった他大学の皆様にも感謝を申し上げます。
Maquinistaに普段から協力いただいているスポンサーの皆さま、科学大関係者の皆様にもお世話になっております。ありがとうございます。
現在私たちの代は、NHK学生ロボコン及び関東春ロボコンに向けて活動しておりますので、今後とも応援よろしくお願いいたします。