
こんにちは。23年度入学の回路制御班のtunaです。
2024年9月8日に豊橋技術科学大学にて開催された東海地区交流ロボコン(通称とうロボ)2024に、東工大から2年生主体のチーム「LostTech」が参加しました。
大会について
今回のテーマは「AsiaTraveler」。ここ2年のNHK学生ロボコンを融合させたようなルールです。詳しくは大会HPをご覧ください。
Maquinistaは苗2本をプラントした後カンボジアに入国し、リングを三つのポールすべてに入れてVゴールで勝利を目指しました。
機体紹介
製作した機体とその搭載機構について簡単に解説します。
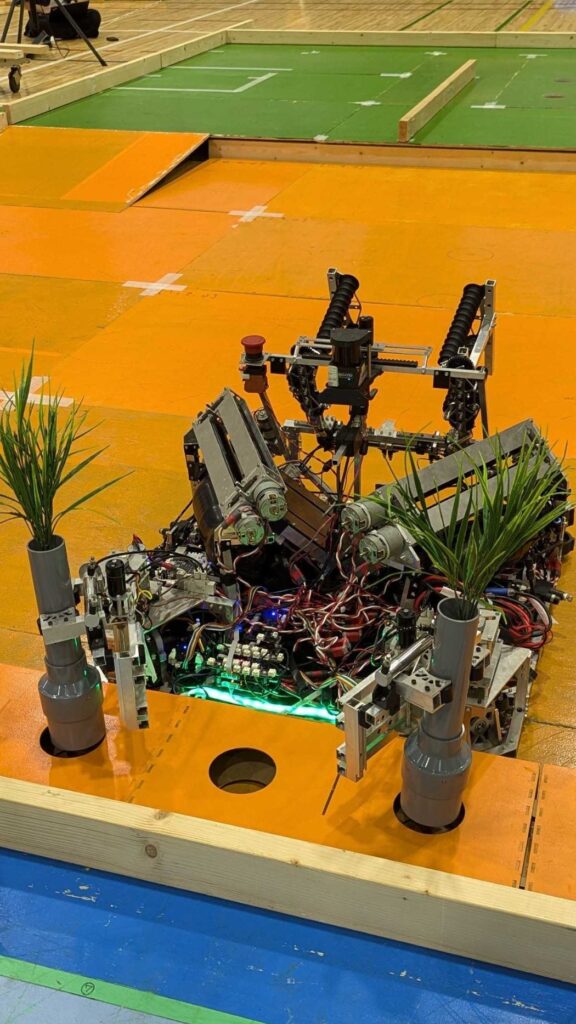
1号機 水無月
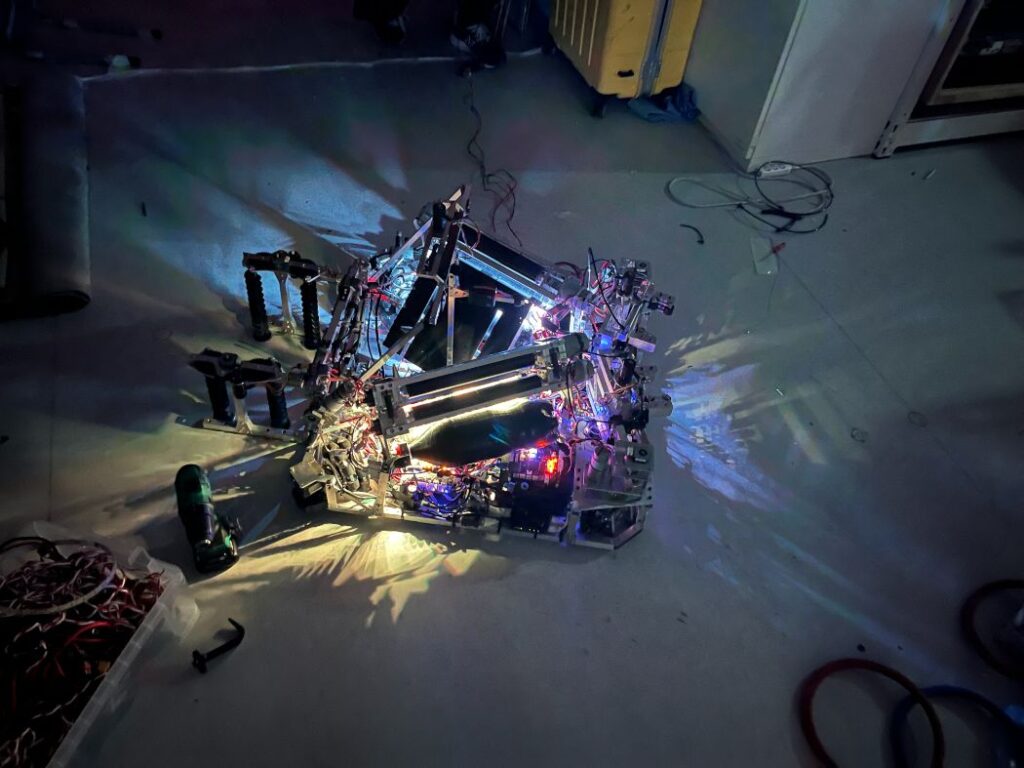
中央のポールを展開機構で得点・妨害し、左右のポールにリングを同時射出できる機体を目指して製作しました。
ローラー射出
距離が短いことと作成に時間がかからないということでローラーを選択しました。
二つのローラーを回転させ、サスペンションで力を十分に伝えながら射出する機構です。
リングハンド・フック
リングを把持するハンドはNHK学生ロボコン2023の豊橋技術科学大学さんの機構を参考に制作しました。リングの摩擦がNHKロボコンとは異なったためなかなか想定通りに動かず苦戦しましたが、改良を重ね何とかタスクを達成することができるようになりました。左右の射出機構へのリングの振り分けはフックを用いて行いました。
苗ハンド
水無月では確実に動く機構を早く制御に渡すというコンセプトだったため、ハンドはエアシリンダの直動をそのままつかむのに利用した機構にし、上下動は24プロジェクトkusakaの滑りねじ機構を採用しました。
直動式のハンドでは横幅が大きくアームを直動にすると初期制限がギリギリになってしまい、かつローラーが苗ハンドの後ろに配置される関係上直動アームでは収納するスペースが確保できなかったため回転方式のアームにしました。
アームを回転方式にしたことで慣性モーメントが大きくなりバックラッシが目立ってしまいました。
妨害
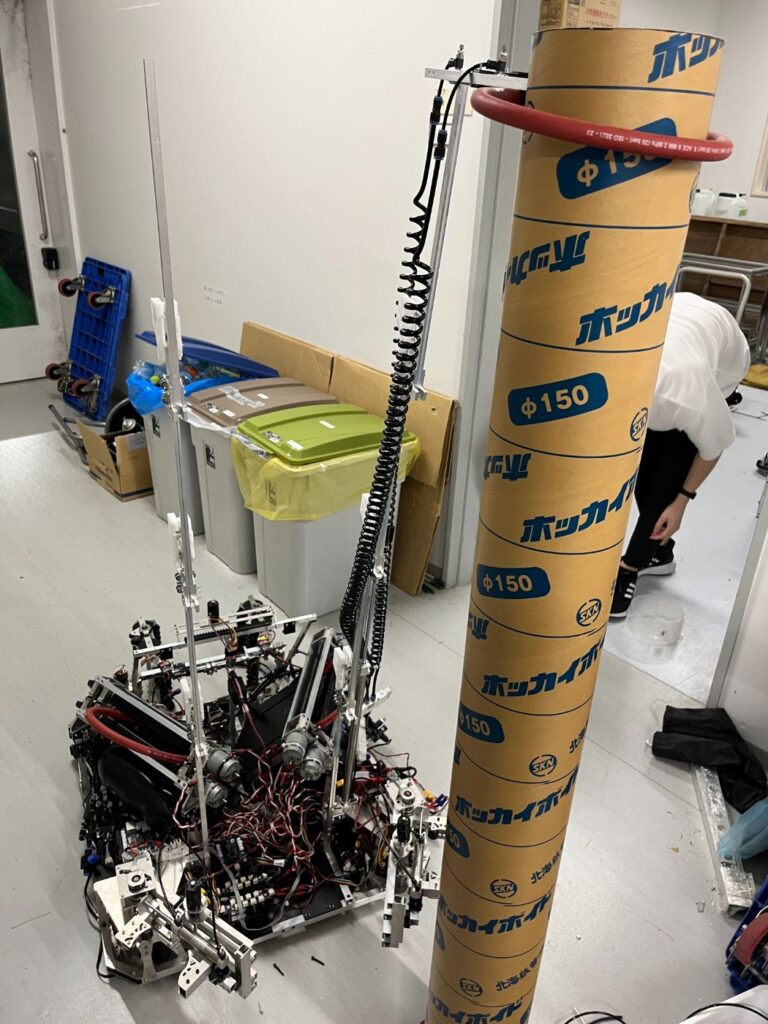
機体の高さの初期制限の700mmから中央のポールの2400mmまで展開する機構です。
機体の完成を早めるのを優先したため、水無月とは別に設計し後付けする形になりました。
結果としては、水無月に付けて実験はできましたが、苗ハンドとの干渉とリングが装填できないという問題のため、本番で採用するクオリティには至りませんでした。
後付けということで省スペース化のために直動機構にし、ワイヤーで動力を伝達することで大きなサイズへの展開を実現しました。(ロジャーアーム機構)
動きの高速化のためアクチュエーターはエアシリンダーにしました。
結果としては妨害機構は乗らず、重量は25kgを余裕で超過。その他回路などの問題もあり、本番は2号機で参加することに決まりました
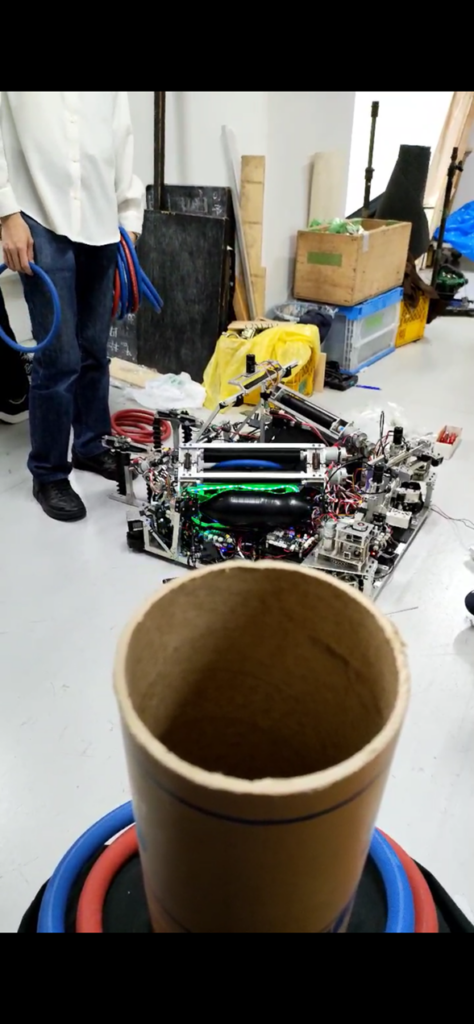
2号機 マゼラン
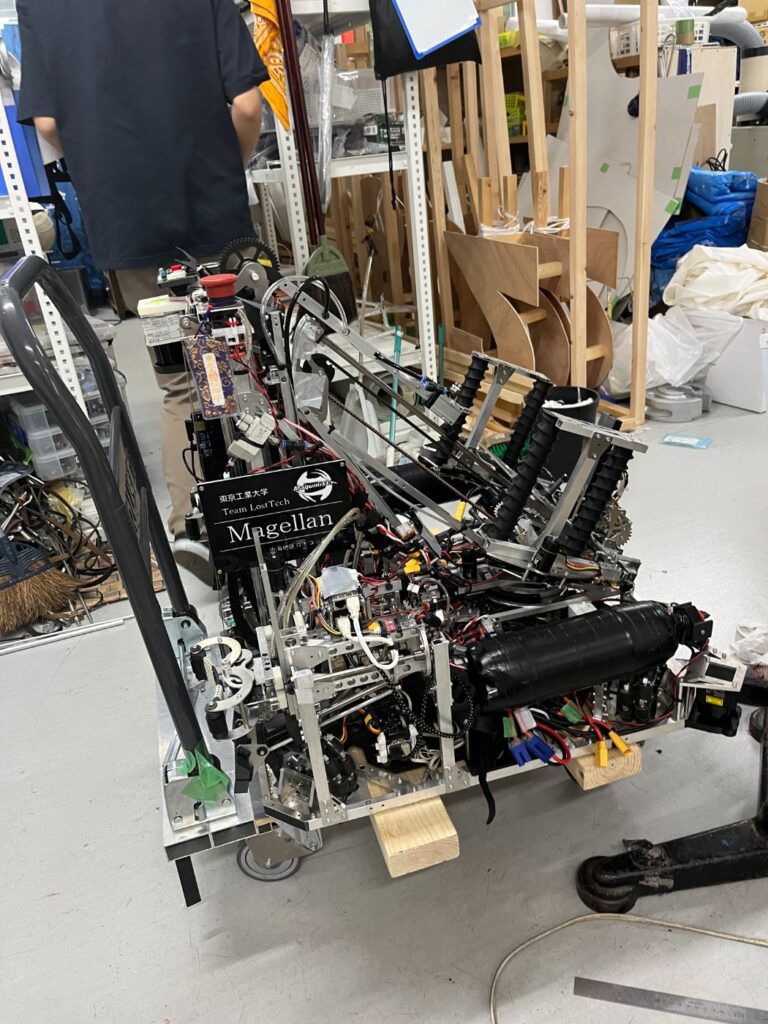
作戦としては水無月とほぼ同じですが、射出機構をベル直1つを回転させて左右交互に得点を狙う方式にしました。また、その他機構の改善を行いました。
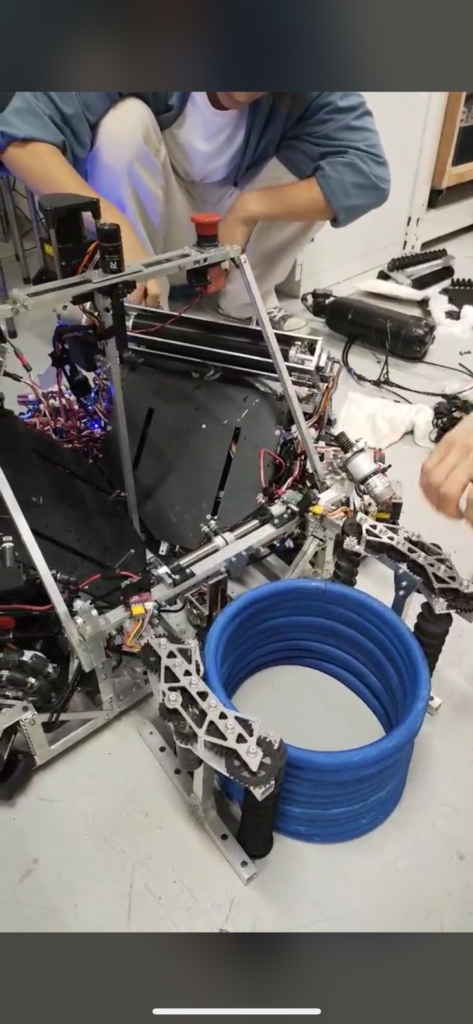
ベル直

2023年度の豊橋技術科学大学さんの射出機構を参考に作成しました。それに加えて、先輩が作成したものも見ながら作りました。リングをまっすぐ、かつ飛ばしたい速度で射出することができるためこの機構を採用しました。タイミングベルトについた部品をリングを載せる台に引っ掛けて、加速し、ポールにリングを入れることができる速度で射出します。また、この射出機構自体がターンテーブルによって回転することで、両端のポールを1つの機構で狙うことができます。リングを載せる台は当初はMDFで制作しましたが、射出時に振動したり、リングとの摩擦の影響からか精度が得られなかったためt3アルミで製作作しました。重量こそ大きくなりましたが、精度が大きく向上しました。また、ターンテーブル自体に多少のガタツキがあったため、それ単独で使用するのではなく、アルミを加工したパーツでガイドをつくることで射出精度を高めるための工夫をしました。
苗ハンド

水無月の苗ハンドの構造では妨害機構を載せることが厳しかったため、アームをエアシリンダによる直動に変更しました。
また、水無月のハンドでは苗を点で支える構造になっていたため許容誤差が小さく左右のずれに弱かったです。そこでマゼランではTPEによる面接触とハンド中心をばねによる固定にすることで左右の許容誤差を大きくし、つかむと同時にばねを前方に押し出し前後の許容誤差を大きくしました。
加工の手間を抑える目的と全体の小型化のためにパーツには3Dプリンターとt2アルミ板が大半を占めるようにしました。
水無月よりも把持力が小さく、上下動による滑りに弱かったため滑り止めを付けましたが、本番のオブジェクトでは塗装による影響かエア漏れによる影響か少し滑ってしまいました。
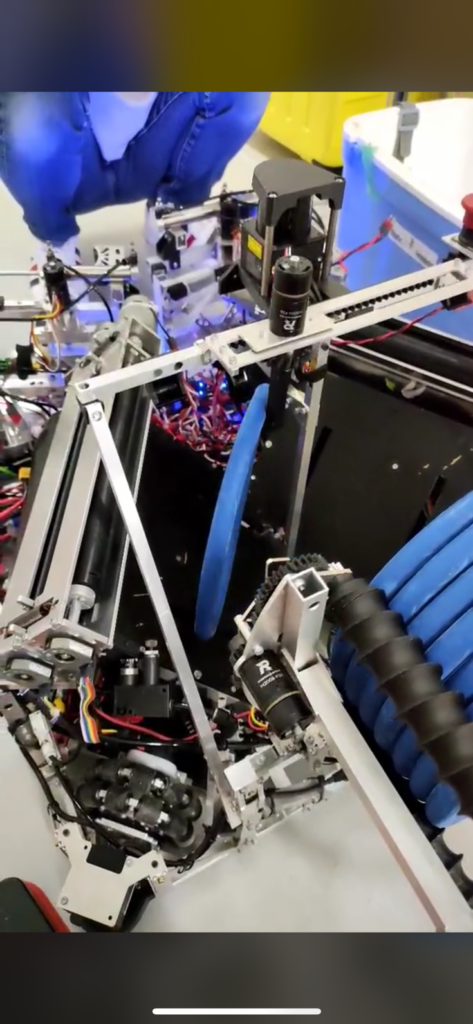
妨害

水無月からの最も大きな変更点としてはアクチュエーターがモーターになった点です。これにより高さの微調整が可能になり、妨害の仕方に幅ができました。
また、上部のリングを掴む用のハンドがちゃんと着きました。
1号機で問題になっていたリングの装填はベル直から行う形にして解決しました。
試合結果
第一試合 vs長岡技術科学大
LostTech 5-10 長岡技術科学大○
前日のテストランでトラブルが続き、思うように調整できなかったため急遽手動機として出場しました。
しかしジャイロとの通信でトラブルが発生し、思うように操縦することができず苗のプラントに失敗し、なかなか点を獲得することができませんでした。
相手の長岡技術科学大も苦戦していましたが、5-10と僅差で破れ、初戦敗退となってしまいました。
総括
メンバーの持てる時間と知恵と体力を全て出し切ったロボコンでしたが、本番・テストランと機体が動かず悔しい結果となりました。
今回の悔しさをバネに、機体が動かなかった原因究明と改良をし、次回のNHK学生ロボコンで良い結果を出せるように開発を進めていきます。応援ありがとうございました。
謝辞
東海地区交流ロボコンで運営をしてくださった方々、貴重な経験の場を用意してくださりありがとうございました。大会後にも運営目線から様々なアドバイスをいただきました。大変参考になります。ありがとうございました。
大会当日交流してくださったロボコニストの皆様、色々と情報交換してくださりありがとうございました。大変参考になりました。
今年のMaquinistaは交流会・練習試合などに積極的に取り組んでいく方針ですので今後ともよろしくお願いします。
Maquinistaに普段から協力いただいているスポンサーの皆様・東工大関係者の皆様、いつもご支援ありがとうございます。近年のロボコンでは画像認識がほとんど必須になるなど高難易度化が進んでおります。それに伴い、高精度のセンサー・高出力のモーターなど高価な物品が必要となり、出費が嵩んでおります。皆様のご支援に大変助けられております。ありがとうございます。
また、Maquinistaでは現在もスポンサーを募集しております。ご連絡をお待ちしております。