
これは工大祭ブログリレー2021の2日目の記事です。
こんにちは、2018年度入学、機械班だったたくぽんです。
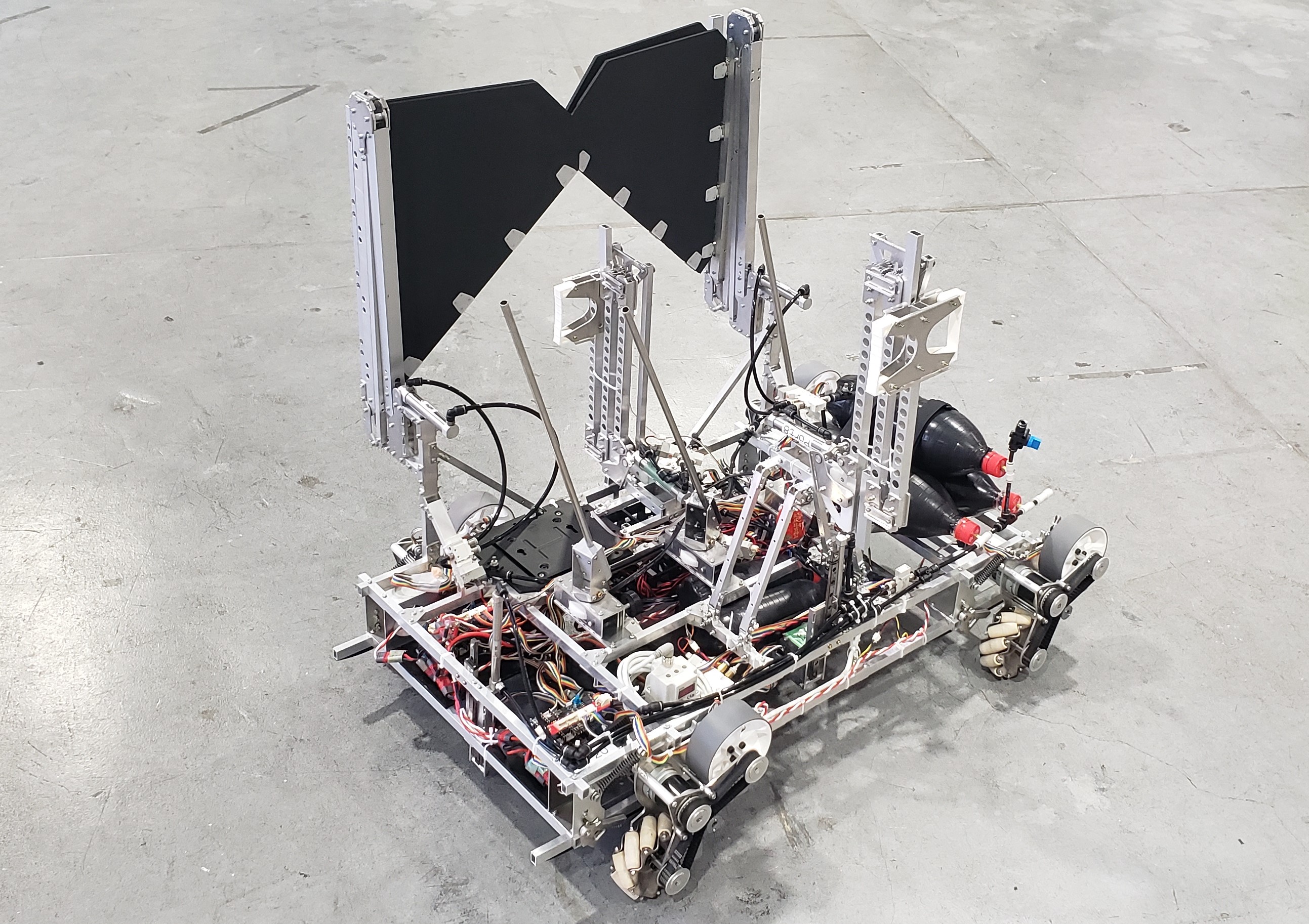
今回は、NHK学生ロボコン2021に出場したDR(ディフェンスロボット)の特殊な移動機構、バッフル乗り越え足回りを紹介しようと思います!
開発の経緯
今年のルールは、ロボットがフィールド上にある壺に矢を投げ入れその数を競うというものでした。今年の特徴として、相手チームへの妨害がルールで認められているということがあります。
TR(スローイングロボットと)DR(ディフェンスロボット)の2台のロボットで競技を行うのですが、DRは壺が乗っているテーブルを回転させる妨害ができます。ただでさえ壺に矢を入れるのが難しいのに、テーブルごと壺の位置が動くなんてことになればとてもじゃないですが得点できないです。
Maquinistaはアイデア会議の結果、「相手がどんな妨害をしてくるか分からないから、相手よりにテーブルを確保して妨害を受けないようにする」という方針で開発を進めることになりました。となれば、DRは最速でテーブルのもとにたどり着く必要があります。
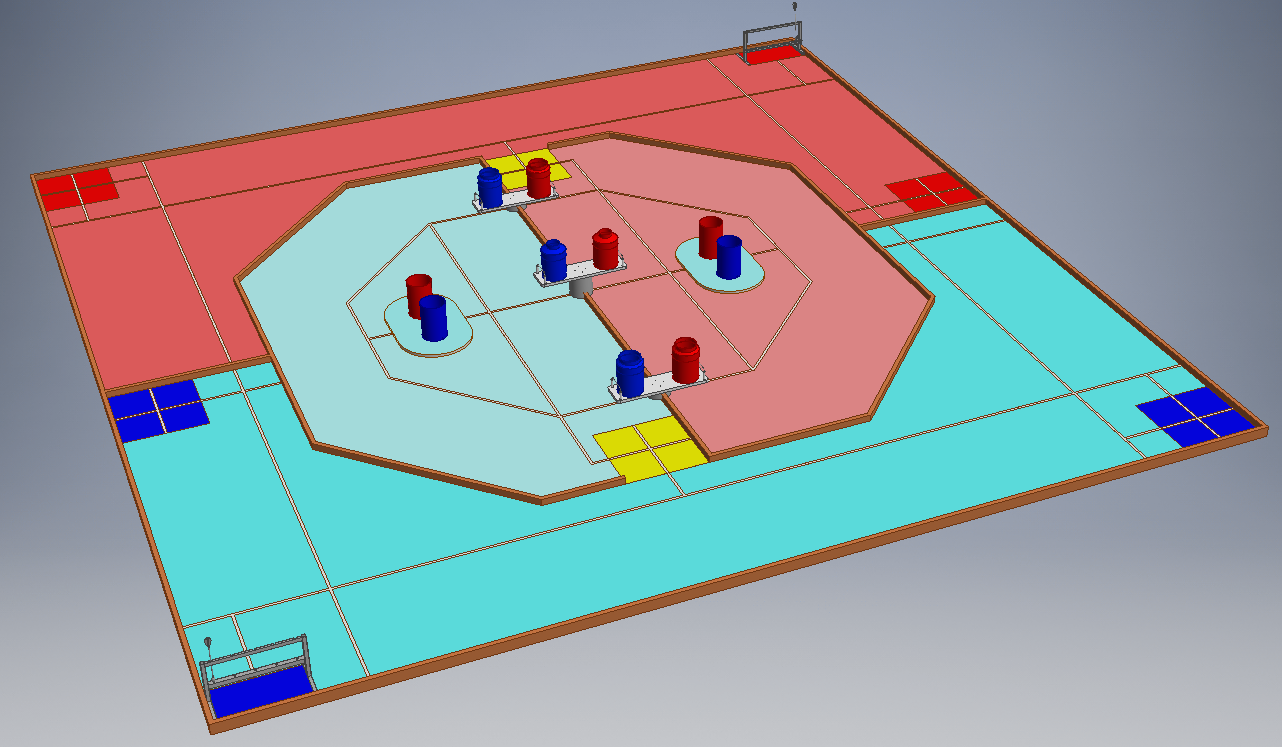
ここで、ルールブックの一文を見てみましょう。

DRのスタートゾーンは画像左上の青い正方形の部分です。
そうなればもうやることは一つですね!
そうだ、バッフル、越えよう。
コンセプトと仕様決定
Maquinistaは2020年にも木枠乗り越え足回りを製作していました( フェンス越え機体の紹介)。この記事には「かまじい」「STARK」の2つの木枠乗り越え足回りが登場していますが、どちらにも以下のような問題点がありました。
- 車輪の上下動の衝撃でジャイロセンサがダメになる
- 車輪を上下させるエアシリンダの伸縮速度(約0.15sec)が高速化の律速になっている(移動速度1000mm/sec程度が構造的な限界)
- 車輪を適切なタイミングで上げ下げする必要があり、制御がシビア
今年はこれらの問題を解決した機構を設計する必要があります。1~3の問題について考えたとき、車輪を鉛直に、能動的に動かしてることがすべての原因となっている気がします。車輪を鉛直向きに動かすためその衝撃が回路類を揺らす方向に働きますし、能動的に動かすため上げ下げのタイミングをロボットに正確に指示してあげる必要があります。
木枠越え動作を試したら衝撃や上下動の不具合でこの世の終わりみたいな挙動になったStark. 能動的に色々動く機構は大変
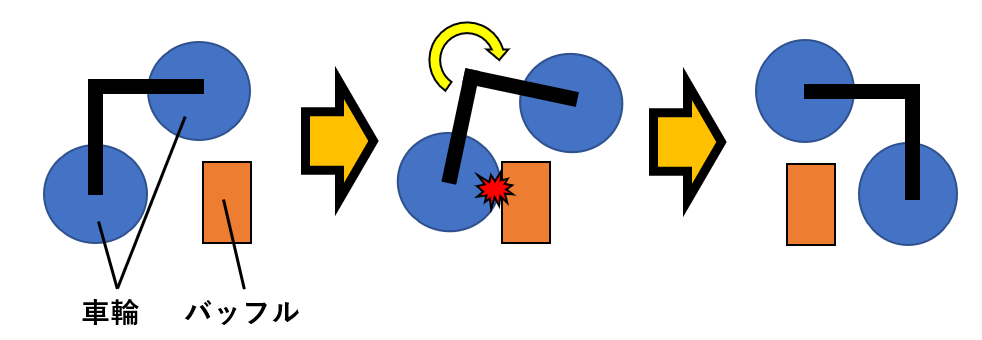
そこで、2つの車輪を回転で切り替え、受動的に動かす機構で木枠を乗り越えるというコンセプトを思いつきました。車輪の上下動をやめることにより機体への衝撃を減らして問題1を解決し、受動的に車輪を切り替えることで問題2,3を解決します。この機構だとバッフルに接するまで4輪が常に接地しているため加速しやすいというメリットもあります。
設計
大きな角管をメインとした構造になりました。
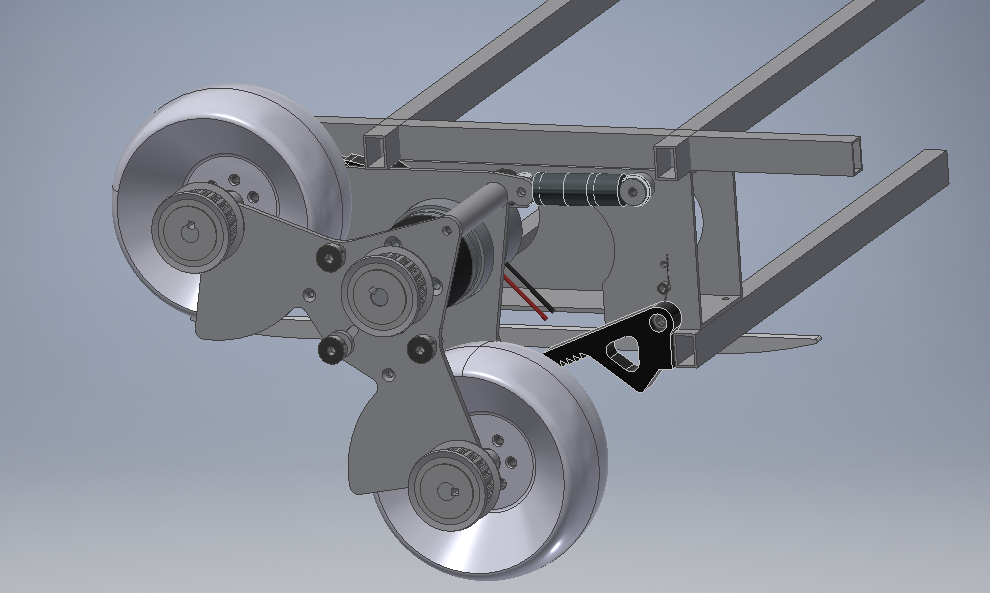
車輪にはバッフルに対して垂直に配置できるメカナムホイールを採用しました。タイミングベルトで2輪同時に回転させます。
8輪メカナムですね(タイヤが8個あるとスピードが出るんだ)。
また、ロック機構が2つ搭載されていてどちらの車輪が接地している状態でも安定するようになっています。あらかじめばねを伸ばしてロックしておき、バッフルに接触することでばねが解放されて車輪が切り替わる仕組みです。
車輪が切り替わってる間はPOM製の「そり」みたいな部品でバッフルの上を滑ることで車体を維持します。
ロック機構の動き. トーションばねも自作しています
製作して実験
まずは1ユニットだけ製作してロック機構の動きを見てみます。
まともに動いてそうですね。ということで4ユニットすべて製作して足回りを組み立てることにします。
初バッフル踏破の動画がこちら。
とても良い感じです!!
所望の動作は実現できたのでここからは様々な改良を施していきます。
改良
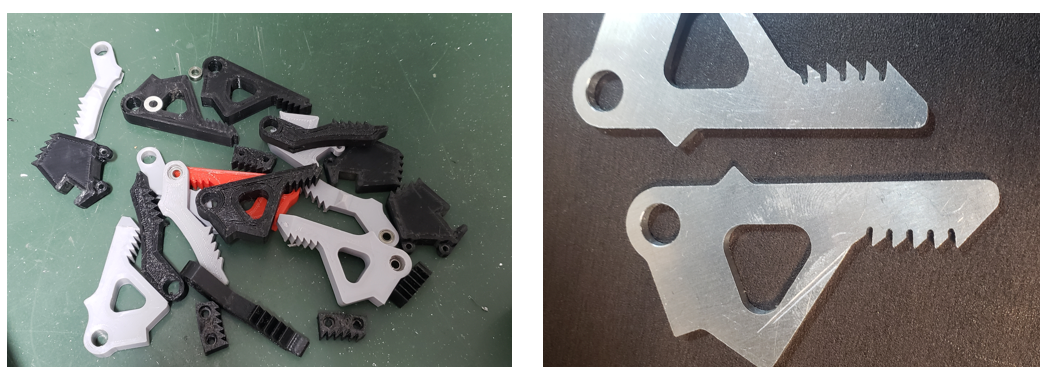
これまでロック部分の部品は3Dプリンタ製の部品を使っていました。設計変更が起きやすいであろうロック部品を簡単に量産するために意図的にしていたのですが、やはり強度が問題になりました。
何度かの仕様変更を経てロック部品の形状は固まっていたので、アルミを切削して製作したロック部品に換装しました。
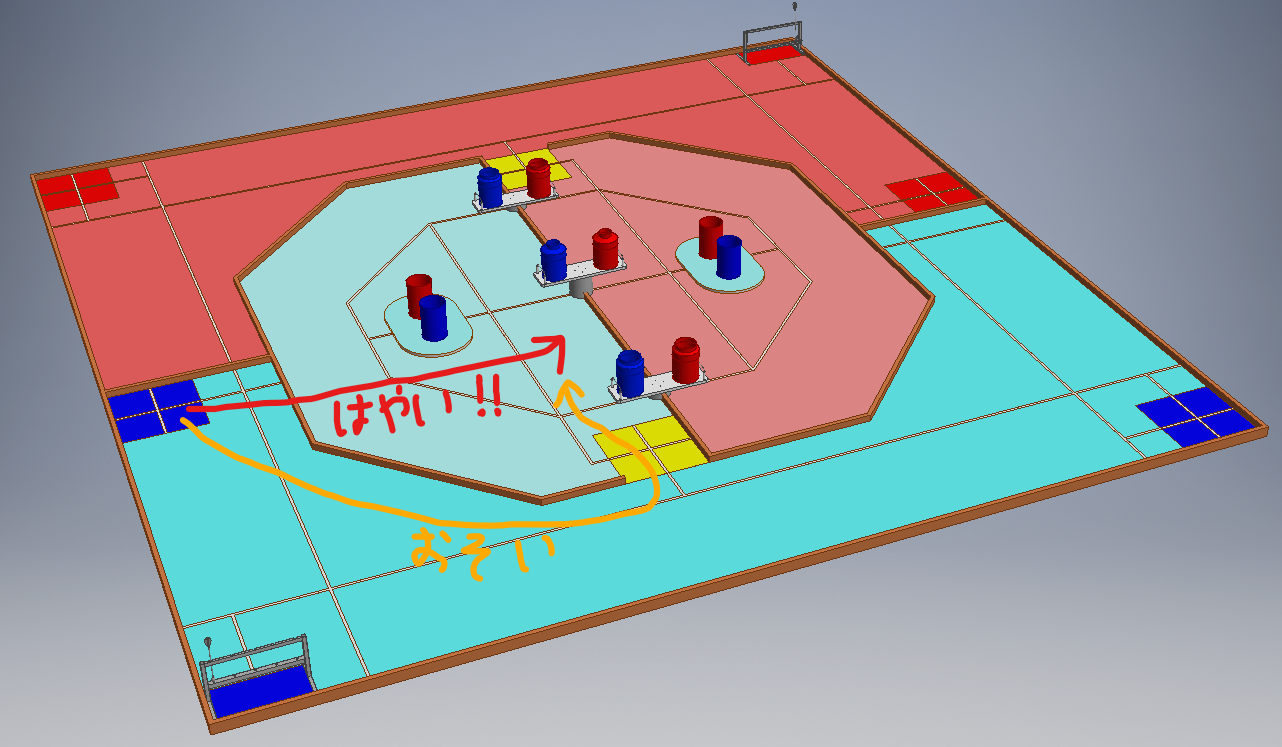
加えて、車輪の変更を行いました。設計時はバッフルを越える前にも全方向移動をする黄色の経路も考えていましたが、練習時間の不足などの関係で赤色の経路を採用することになりました。
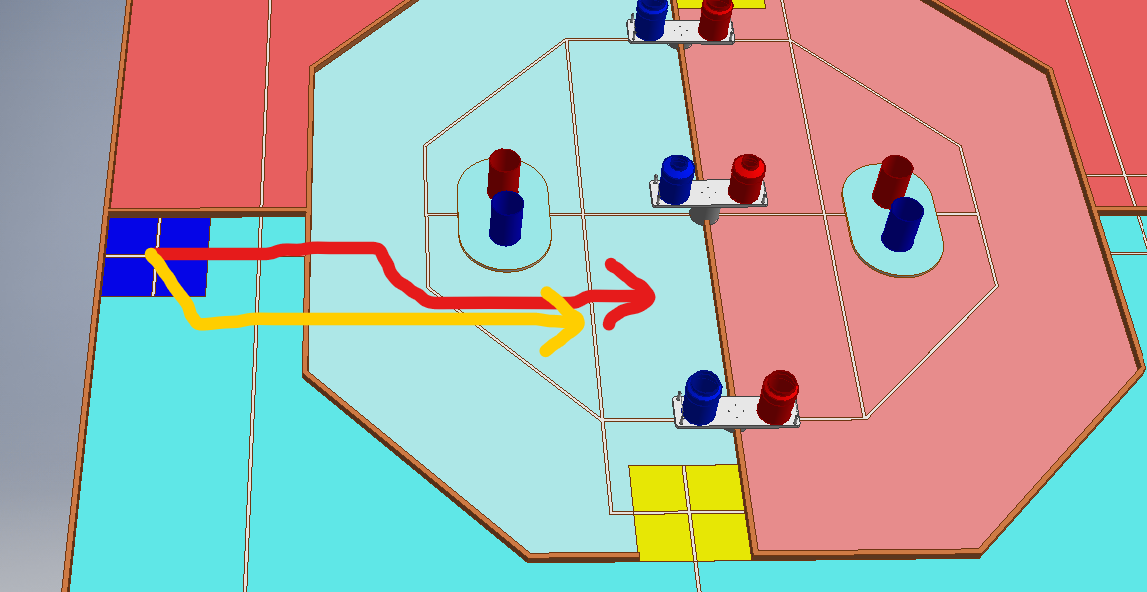
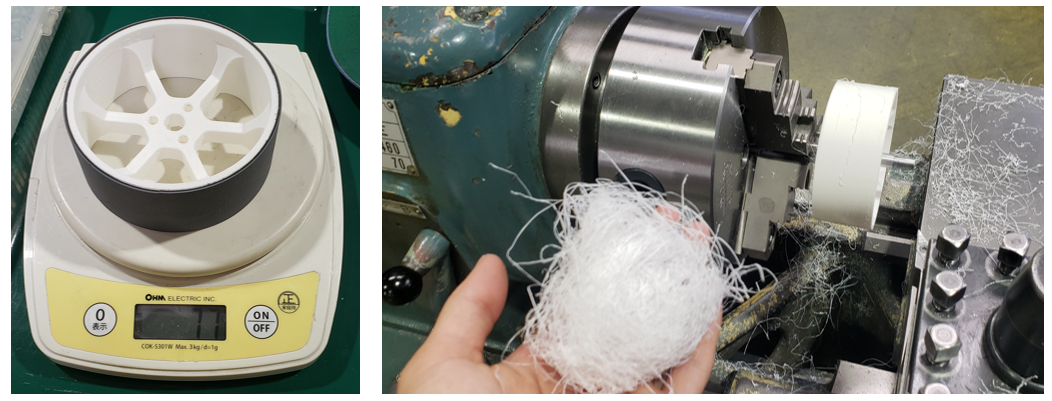
赤色の経路の場合、バッフル乗り越え前の車輪は全方向移動できる必要はないのでメカナムホイールを使う意味はゼロです。ということで、メカナムホイールの代わりに3Dプリンタ製のホイールにゴムを巻き付けた車輪を使うことにしました。
これによってスタート後の加速性能が向上したほか、車輪が250gほど軽くなりました。この車輪はバッフル踏破後も空中で回り続けるので、軽量化によって慣性モーメントを減らすことによる制御性の向上も狙っていました。
完成!
ロック機構の動作。ロックの動作音が心地いいです。
メカナムを8輪使用していた頃の動画ですが、自動走行でバッフルを乗り越える様子です。
機体の揺れがほとんどなく、目指していたことが全部できました!
最終的に、足回り1ユニット当たり1.5kg、足回り全体(回路等は含めず)で8kg程度になりました。
まとめ
今回はバッフル乗り越え足回りを紹介しましたが、楽しんでいただけたでしょうか?
去年の同様の機構からかなり進化したものを作ることができました。試合中に独立4輪から4輪メカナムに構造が変わるというロマン機構ですが、しっかりと動作するものに仕上げられて大満足です。
こういう社会ではあんまり見ない変な機構を作れるのもロボコンの醍醐味だと思いますね。
興味があればぜひMaquinistaに!ではまた!
裏話
11月ごろに「1号機やし攻めたやつ開発したろ!」ということでバッフル乗り越え足回りを採用しましたが、活動禁止の影響で組立ったのは5月半ばでした。
ビデオ審査期限が目前に迫り、一発で成功しないといけない機構になってしまっていたので当時はヒヤヒヤでした。動いて本当に良かった…
おまけ: 暴走して高速でバッフルに突っ込んだ時の動画