
こんにちは。東海地区交流ロボコン(通称とうロボ)でリーダー、操縦者を務めた24年度入学機械班の24-ryotaroです。
2025年9月7日に豊橋技術科学大学にて開催された東海地区交流ロボコン2025に、東京科学大学(以下科学大)から2年生主体のチーム「Maquinista」が参加しました。
大会について
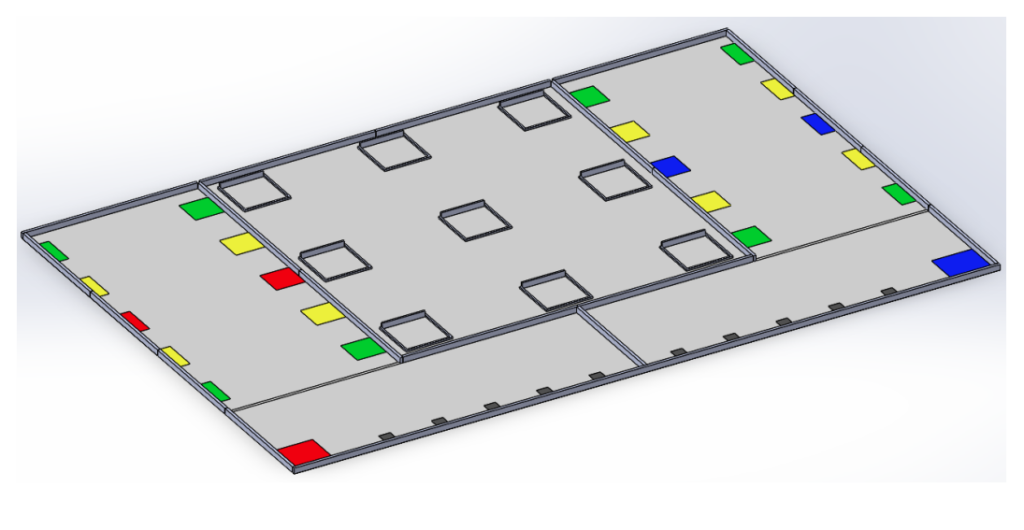
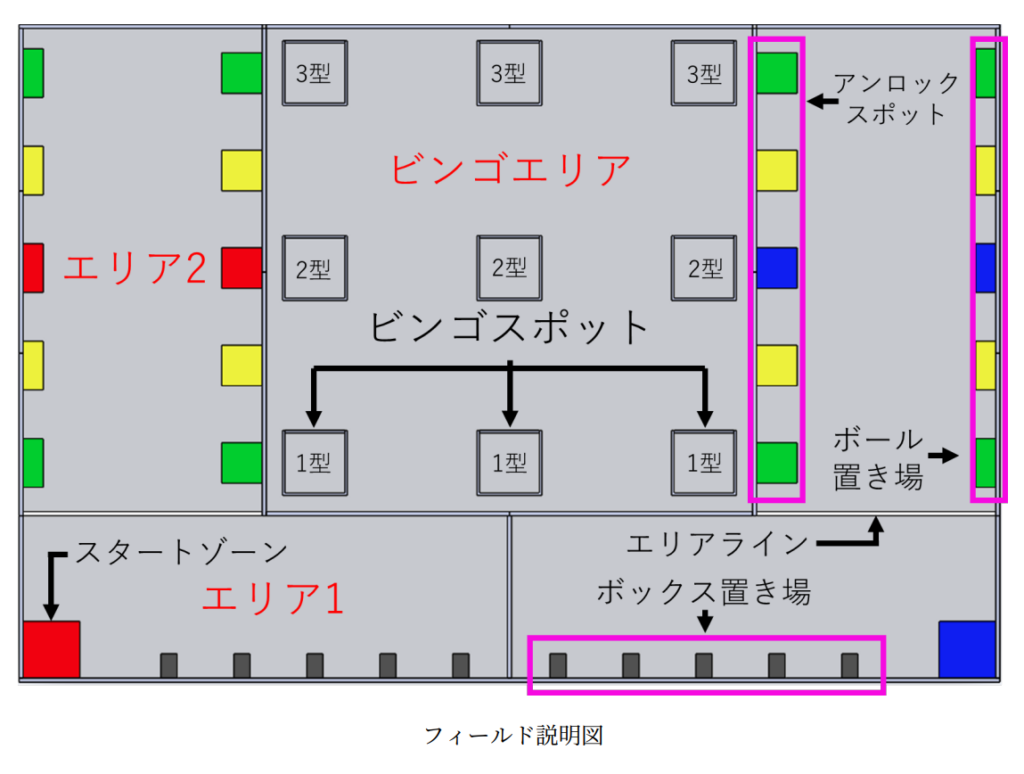
今回のとうロボの課題は「Let’s BINGO!」であり、ロボットがボールを射出することによりフィールド中央3×3の9マスで先に2つのBINGOを達成したチームが勝利します。
以下、大会公式ルールブックよりの引用です。
「競技の概要は以下の通りです。最初に、ボックス置き場から色付きのボックスを回収し、それらを同じ色のボックス用スポット(アンロックスポット)に配置します。アンロックスポットは合計5箇所あります。ボックスを設置したあと、ロボットはボールを回収し、9箇所のボール用スポット(ビンゴスポット)に投げ入れます。相手より多くの ボールをビンゴスポットに入れて、ビンゴスポットを占領し、ビンゴを作成して行きます。」
(とうロボHPより引用)
機体紹介
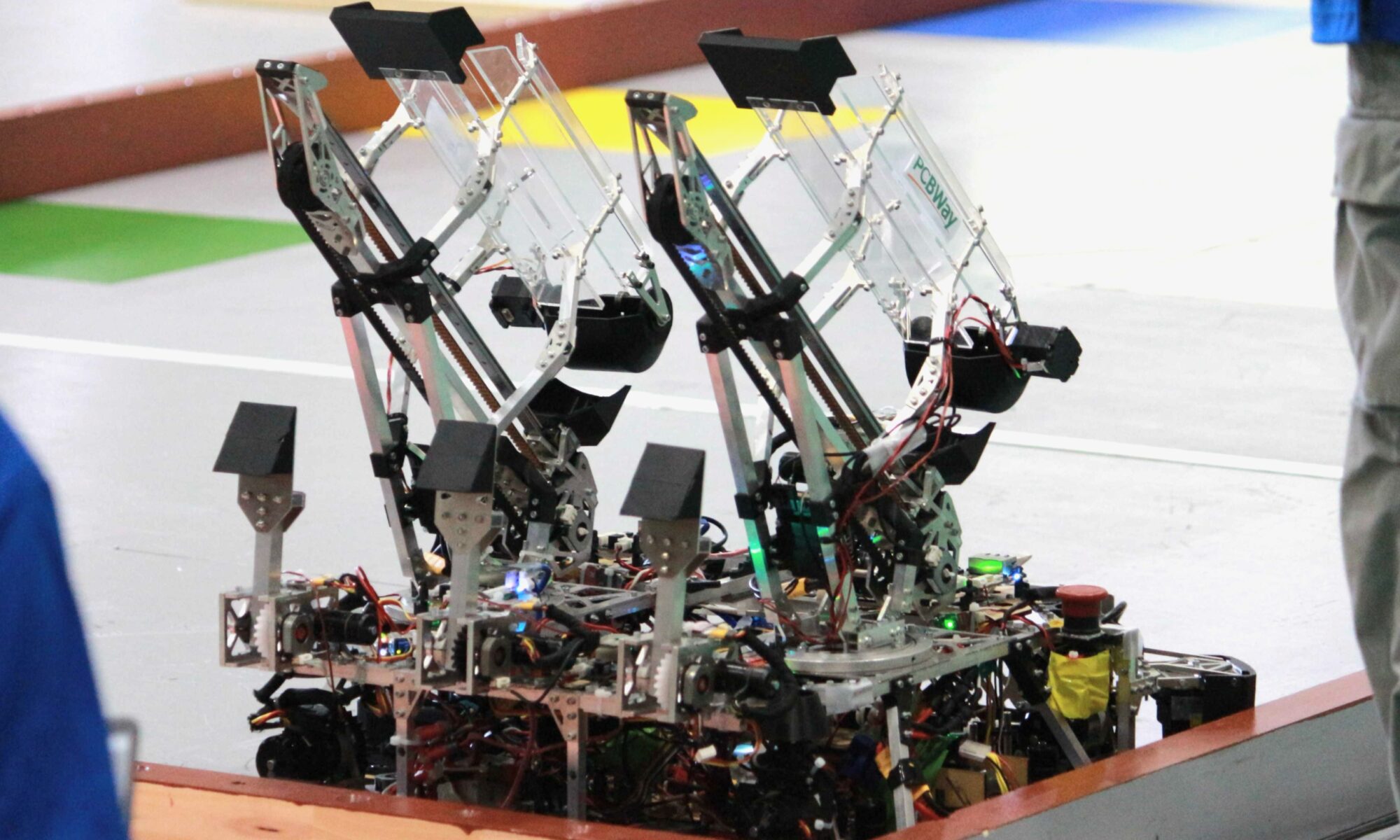
今回の大会では独立四輪ステアリングと、ベルトを用いた直動射出機構を2つ搭載した「Gamman」という機体を作成しました。「Gamman」という名前にはこのロボットが2年生チームとしての3つ目(γ)の機体であることと、ガンマンのように正確無比な射出を行うことを期待することをかけた意味があります。
以下に各機構の説明を記載します。
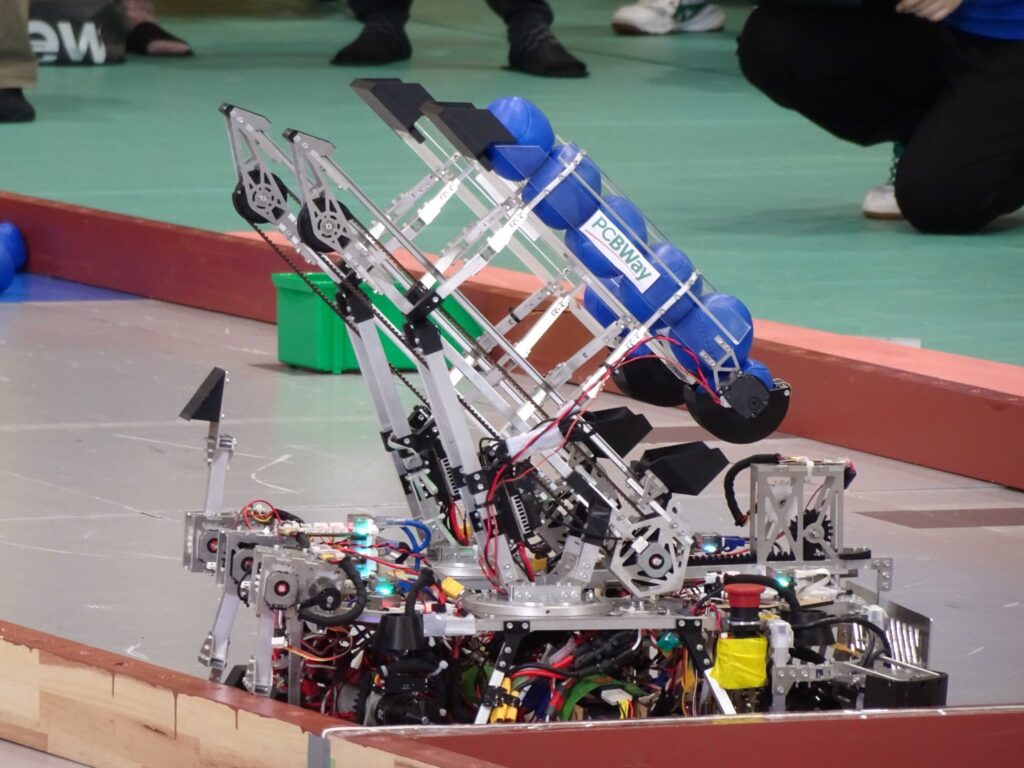
ベルト直動機構
今回の大会では射出機構としてローラーを用いた機構と、ベルトによる直動機構の2つを作成し、実験を通してベルト直動機構を採用しました。大会中、屈指の射出精度を披露することができました。
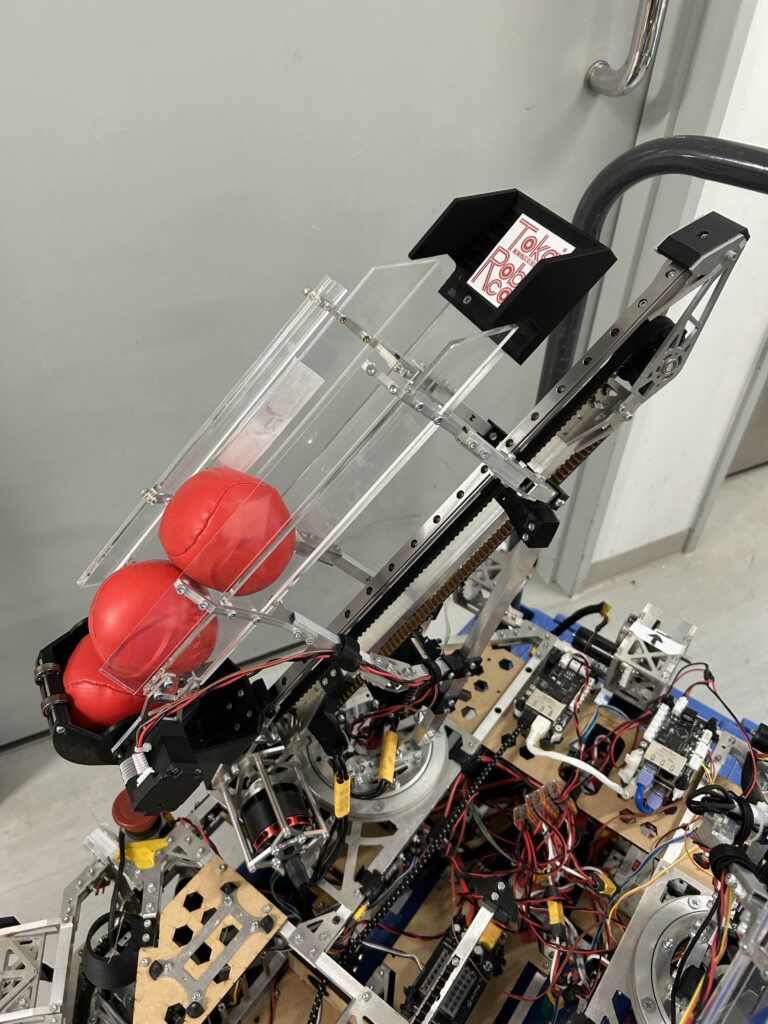
ボール回収機構
こちらの機構は走りながらボールを回収することをコンセプトとして作成しました。機体内にボールを格納できるスペースを作り、その中にボールを押し入れることで回収します。
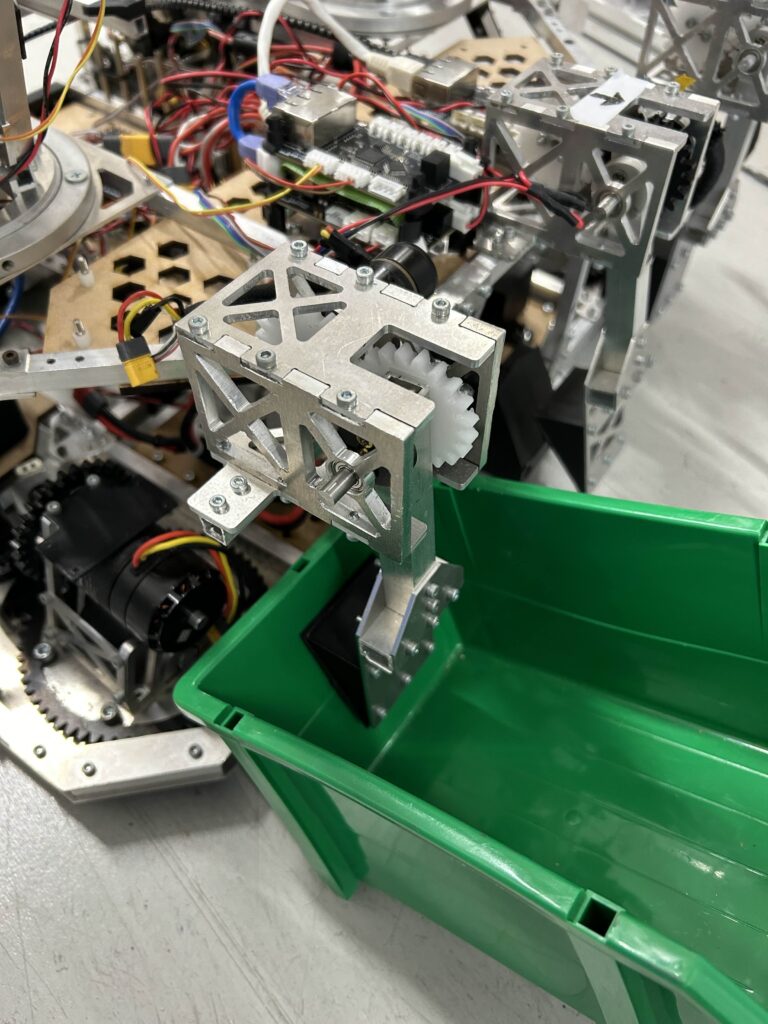
ボックス回収機構
こちらの機構は先端に斜面形状の部品を取り付けた角材を回転させて、ボックスの内面を押さえつけることで回収します。斜面形状の部品によりボックスを運ぶときに地面との接触を減らすという意図があります。
独立四輪ステアリング
今回の大会では走行領域が広く直進的な動きが多くなることから、走行部に独立四輪ステアリングを採用しました。

大会成績
とうロボ公式Xより引用
- 予選第一試合 vs 新潟大学 科学技術研究部 90対130で敗北
試合前半は互いに打ち合いの接戦でしたが、ボックス・ボールの再回収に時間がかかってしまい回収したボールを制限時間以内に打ち切ることができずに敗北しました。 - 予選第二試合 vs 東京農工大学 蝦.N.G.O MaquinistaのVゴールで勝利
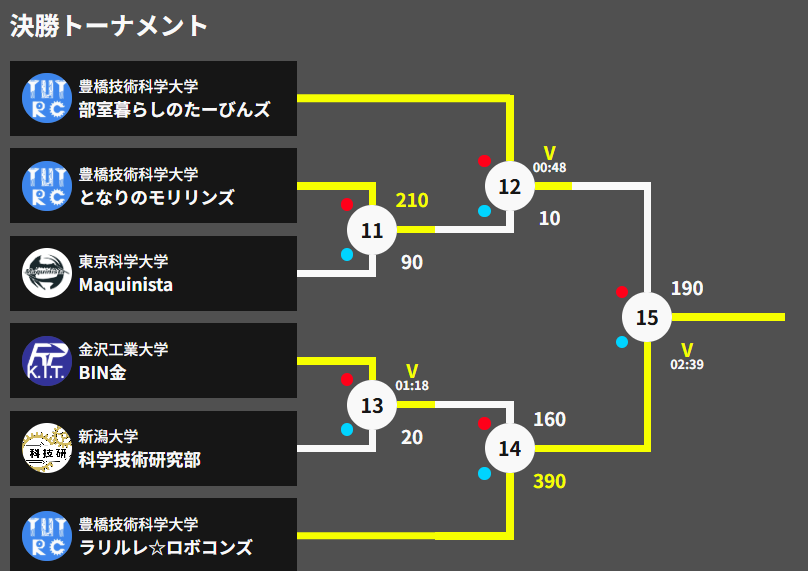
ボックス・ボールの回収に手間取り出遅れたスタートになりましたが、ボールを多く回収できたおかげで対戦相手に迫ることができました。再回収したボール一つを最後のスポットに入れることができVゴール、勝利しました。 - 決勝トーナメント第一試合 vs 豊橋技術科学大学 となりのモリリンズ 90対210で敗北
試合前半は練習通りの動きができましたが、試合開始2分ごろに独立四輪ステアリングの操舵部分にエラーが発生し、走行できなくなりました。リトライによって復帰を試みましたが、思うような操縦ができず、その後得点できず敗北しました。
最終結果と総括
今回のとうロボではベスト6という結果でした。
予選ではVゴールを達成できたものの、決勝トーナメントではイレギュラーへの対応練習が足りておらず悔しい結果となってしまいました。実際のフィールドでの練習が十分とは言えない状態での出場になってしまい、反省する点が多い大会でした。
2年生の次の大会はNHK学生ロボコンです。これまでのロボコンで得た知識、反省を活かして悔いの残らない大会にできるようチーム一同開発を進めていきます。応援ありがとうございました。
謝辞
大会協賛企業より参加賞をいただきました。この場をお借りして感謝を申し上げます。
この大会という場を提供していただいたとうロボ運営委員会の皆様、技術交流会で情報交換してくださった他大学のロボコニストの皆様にも感謝を申し上げます。大変学びのある大会でした。
Maquinistaに普段から協力いただいているスポンサーの皆さま、科学大関係者の皆様にもお世話になっております。ご支援ありがとうございます。
また、Maquinistaでは現在もスポンサーを募集しております。ご連絡をお待ちしております